
【導(dǎo)讀】導(dǎo)航通常與汽車、飛機(jī)及船舶相關(guān)。然而,在工業(yè)和醫(yī)療保健領(lǐng)域,精密導(dǎo)航正日益廣泛地運(yùn)用于從工廠機(jī)械和手術(shù)機(jī)器人到應(yīng)急響應(yīng)跟蹤的各種應(yīng)用?,F(xiàn)有多種與定位、轉(zhuǎn)向和引導(dǎo)設(shè)備相關(guān)的方法,可用于獲得位置、方向和運(yùn)動(dòng)信息。事實(shí)上,許多應(yīng)用已普遍依賴于GPS(全球定位系統(tǒng))。然而,當(dāng)涉及到室內(nèi)導(dǎo)航以及處理更復(fù)雜、更具環(huán)境挑戰(zhàn)性的情況時(shí),單靠GPS已無(wú)法滿足需求。
針對(duì)上述應(yīng)用,可使用各類傳感器來(lái)改善系統(tǒng)區(qū)分實(shí)際運(yùn)動(dòng)與異常運(yùn)動(dòng)的能力。某一傳感器處理特定導(dǎo)航問(wèn)題的能力不僅取決于該傳感器的性能水平,同時(shí)也取決于該應(yīng)用特有的動(dòng)態(tài)特性。和處理所有復(fù)雜設(shè)計(jì)問(wèn)題一樣,首先需要了解最終應(yīng)用的目標(biāo)和限制,由此可將各項(xiàng)關(guān)鍵性能參數(shù)進(jìn)行排序,從而大致了解所需的傳感器,然后通過(guò)仔細(xì)的傳感器調(diào)理、集成和處理,對(duì)實(shí)際設(shè)計(jì)進(jìn)行優(yōu)化。
了解導(dǎo)航問(wèn)題
我們首先來(lái)打一個(gè)比方:假設(shè)您正在工作,想來(lái)杯咖啡,于是您起身去找咖啡壺。如果您之前去過(guò)放咖啡壺的地方,您的腦海中就會(huì)形成一條路線。不過(guò),沿途您還需依靠各種感知,包括視覺(jué)、聽(tīng)覺(jué)、平衡,甚至觸覺(jué)等,才能到達(dá)該位置。您自身的處理器會(huì)結(jié)合使用各種感知來(lái)源,以及某些嵌入式的模式識(shí)別,如果運(yùn)氣不好,您可能還得暫停下來(lái),尋求一些外部輸入,即方向。在整個(gè)過(guò)程中,您所依賴的自身傳感器不僅需要逐個(gè)保持精確,還必須默契配合,必要時(shí)可拒絕誤導(dǎo)信息(旁邊隔間飄來(lái)的咖啡味道),并尋求其它傳感器的幫助。在抵達(dá)目的地的過(guò)程中,您所采用的技術(shù)與車輛、手術(shù)儀器和機(jī)器人導(dǎo)航系統(tǒng)的設(shè)計(jì)人員使用的技術(shù)并無(wú)不同。
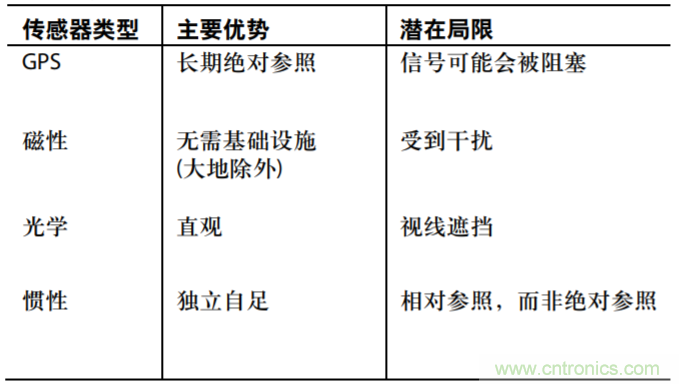
將上述例子擴(kuò)展到工業(yè)領(lǐng)域,會(huì)涉及到多種傳感技術(shù),而這些技術(shù)中,無(wú)一能夠獨(dú)力滿足大多數(shù)應(yīng)用需求。正如此前所提及的,由于障礙物會(huì)阻擋衛(wèi)星接收,GPS容易出錯(cuò),要么降低總體精度,要么降低更新速率。另一種常見(jiàn)的導(dǎo)航輔助設(shè)備是磁力計(jì),它需要暢通無(wú)阻地訪問(wèn)地球磁場(chǎng),雖然這一條件通??梢詫?shí)現(xiàn),但工業(yè)環(huán)境中還存在許多現(xiàn)場(chǎng)干擾,使得磁力計(jì)的可靠性不盡如人意,能間歇性保持可靠運(yùn)行已屬萬(wàn)幸。光學(xué)傳感器會(huì)遇到視線遮擋問(wèn)題,雖然慣性傳感器通常不受這些干擾影響,但也有某些自身的局限性,例如缺乏絕對(duì)參照(哪個(gè)方向是北?)。表1列出了各類主要導(dǎo)航傳感器的相對(duì)優(yōu)勢(shì)和潛在問(wèn)題。
表1. 傳感器的優(yōu)勢(shì)/局限
傳感器的選擇與處理
除了解決最簡(jiǎn)單的問(wèn)題外,大多數(shù)解決方案都依靠多種類型的傳感器來(lái)提供各種條件下所需的精度與性能。慣性傳感器,例如基于微機(jī)電系統(tǒng)(MEMS)的加速計(jì)和陀螺儀,有潛力完全彌補(bǔ)其它傳感器類型的缺點(diǎn),因?yàn)榇祟悅鞲衅骺梢员苊庵T多干擾,而且不需要外部基礎(chǔ)設(shè)施(無(wú)需衛(wèi)星、磁場(chǎng)、相機(jī)…只需要慣性)。
MEMS慣性傳感器可靠性高(在汽車行業(yè)擁有20年的應(yīng)用歷史),功耗低,尺寸小,它在手機(jī)和視頻游戲領(lǐng)域的成功應(yīng)用充分表明,它具有很強(qiáng)的商業(yè)吸引力。然而,不同器件的性能水平大不相同,適合游戲的器件并不能解決先前所述的高性能導(dǎo)航問(wèn)題。例如,精密工業(yè)和醫(yī)療導(dǎo)航所需的性能水平通常比消費(fèi)電子設(shè)備所用MEMS傳感器的性能水平高出一個(gè)數(shù)量級(jí)。
在大多數(shù)情況下,器件的運(yùn)動(dòng)較為復(fù)雜(超過(guò)一個(gè)軸),因此需要使用全慣性測(cè)量單元(IMU)。IMU可集成多達(dá)6自由度的慣性運(yùn)動(dòng)檢測(cè)——三個(gè)線性自由度、三個(gè)旋轉(zhuǎn)自由度(見(jiàn)圖2)。
例如,ADI公司的ADIS16334 iSensor IMU具有解決大多數(shù)工業(yè)導(dǎo)航問(wèn)題所需的集成度和性能,設(shè)計(jì)緊湊,適用于眾多工業(yè)儀表及車輛(見(jiàn)圖1)。很多情況下還能集成4個(gè)或4個(gè)以上的額外自由度,包括三軸磁性檢測(cè)、單軸壓力(高度)檢測(cè)。
圖1. 6自由度運(yùn)動(dòng)檢測(cè),采用11 mm × 22 mm ×33 mm封裝
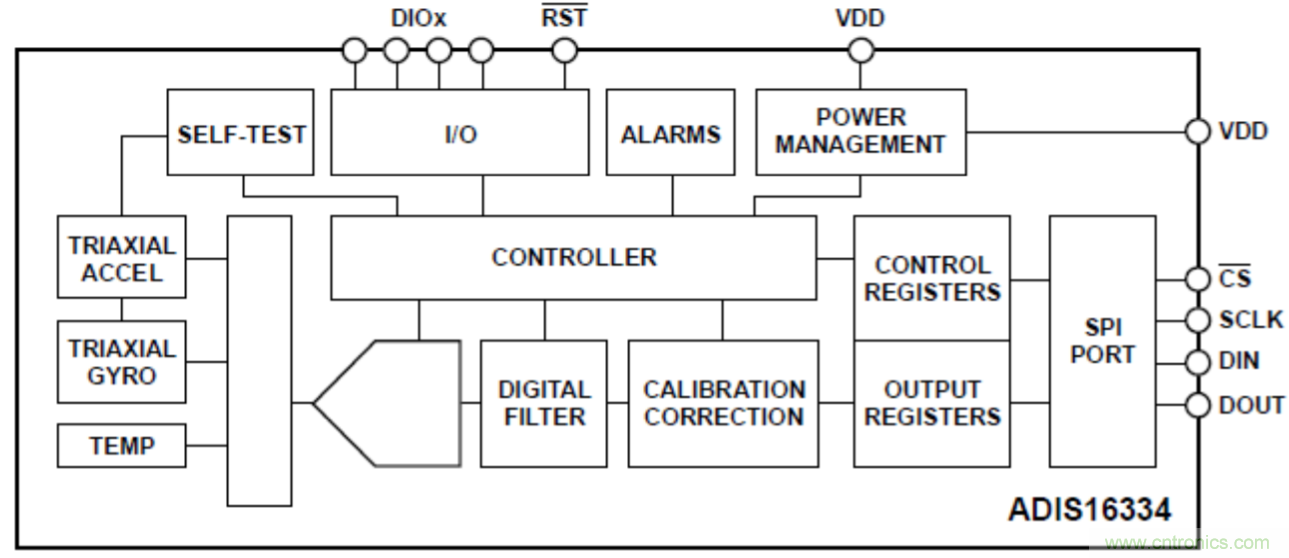
圖2. 慣性測(cè)量單元捕捉復(fù)雜多軸運(yùn)動(dòng)
正如此前所描述的,任何類型的傳感器都有其局限性,如果這些局限性對(duì)系統(tǒng)性能目標(biāo)產(chǎn)生影響,設(shè)計(jì)人員可以在采用補(bǔ)償技術(shù)的同時(shí)合并多種類型的傳感器。例如,慣性測(cè)量單元輸出高度穩(wěn)定的線性和旋轉(zhuǎn)傳感器值,可對(duì)下列影響進(jìn)行補(bǔ)償:
• 溫度和電壓漂移
• 偏置、靈敏度和非線性度
• 振動(dòng)
• X、Y、Z軸對(duì)準(zhǔn)誤差
慣性傳感器的質(zhì)量不同,漂移度也不同,有時(shí)也可使用GPS或磁力計(jì)來(lái)糾正該漂移。除了良好的傳感器設(shè)計(jì)外,導(dǎo)航應(yīng)用的核心挑戰(zhàn)在于確定要依靠哪些傳感器以及何時(shí)依靠這些傳感器。慣性MEMS加速計(jì)和陀螺儀的應(yīng)用已證明,它們是良好的補(bǔ)充手段,有助設(shè)計(jì)人員設(shè)計(jì)出功能完善的檢測(cè)系統(tǒng)。
使用MEMS慣性傳感器進(jìn)行設(shè)計(jì)
在工業(yè)或醫(yī)療室內(nèi)環(huán)境中,沒(méi)有GPS信號(hào),卻存在機(jī)械、電子方式引起的磁干擾,設(shè)計(jì)人員必須建立較為新穎的機(jī)械導(dǎo)航方法。很多新興應(yīng)用(如手術(shù)工具導(dǎo)航)所需的精度水平大大高于汽車導(dǎo)航等要求。在這些情況下,可選用慣性傳感器,此類傳感器可在視線遮擋或存在對(duì)非慣性傳感器有不利影響的其它干擾源時(shí),提供保持精度所需的航位推算導(dǎo)航。
圖3顯示了一種通用慣性導(dǎo)航系統(tǒng)(INS),可用于車輛、飛機(jī)、手術(shù)工具等任何設(shè)備的導(dǎo)航。INS型號(hào)中包含了一個(gè)卡爾曼濾波器,該濾波器在阿波羅登月計(jì)劃中首次使用,目前廣泛應(yīng)用于移動(dòng)通信中的鎖相環(huán)。它提供的機(jī)制可合并多個(gè)有優(yōu)點(diǎn)、但并不完美的傳感器,從而最有效地估算出位置、方向和整體運(yùn)動(dòng)動(dòng)力學(xué)特性。
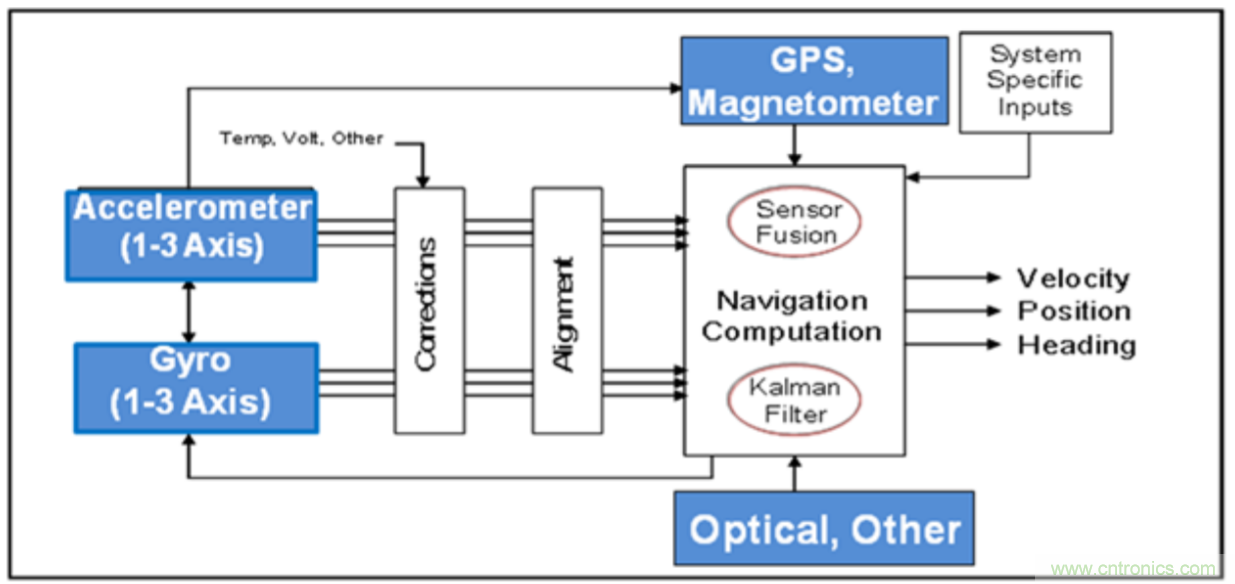
圖3. 慣性導(dǎo)航系統(tǒng),在卡爾曼濾波器的輔助下合并多種類型的傳感器
在手術(shù)應(yīng)用中,INS可用作導(dǎo)航輔助設(shè)備,以根據(jù)病人的獨(dú)特身體特征,將人造關(guān)節(jié)(例如膝關(guān)節(jié)或髖關(guān)節(jié))進(jìn)行對(duì)準(zhǔn)。除了改善對(duì)準(zhǔn)效率以提高舒適度,并實(shí)現(xiàn)更快、更無(wú)創(chuàng)的手術(shù)之外,使用正確的傳感器還有助于防止手顫、減輕疲勞。近年來(lái),光學(xué)對(duì)準(zhǔn)已成為了純機(jī)械對(duì)準(zhǔn)的補(bǔ)充手段,然而,就和車輛導(dǎo)航中的GPS遮擋問(wèn)題一樣,手術(shù)室中也有潛在的視線遮擋問(wèn)題,會(huì)限制光學(xué)傳感器的精度。慣性導(dǎo)航的手術(shù)對(duì)準(zhǔn)工具不存在視線問(wèn)題,同時(shí)還在尺寸、成本、自動(dòng)化方面具有潛在優(yōu)勢(shì),因此可為光學(xué)導(dǎo)航提供補(bǔ)充,甚至取而代之。
雖然解決導(dǎo)航問(wèn)題的基本原理在不同應(yīng)用中都是一致的,但必須充分了解終端系統(tǒng)的具體特性。這些特性最終會(huì)影響合適的傳感器類型的選擇,還會(huì)影響整體性能。
在消費(fèi)應(yīng)用強(qiáng)烈追求小尺寸、低功耗、多軸慣性傳感器的同時(shí),某些傳感器開(kāi)發(fā)人員同樣高度重視可用于各種條件下的高精度、低功耗、高性能緊湊型傳感器。這些高精度、環(huán)境適應(yīng)能力極強(qiáng)的傳感器正在不斷發(fā)展,這一趨勢(shì)在工業(yè)、儀器、醫(yī)療市場(chǎng)掀起了新一輪的MEMS慣性傳感器應(yīng)用浪潮。
推薦閱讀:



