

【導(dǎo)讀】視覺避障是指移動(dòng)機(jī)器人在行走過程中,通過傳感器感知到在其規(guī)劃路線上存在靜態(tài)或動(dòng)態(tài)障礙物時(shí),按照 一定的算法實(shí)時(shí)更新路徑,繞過障礙物,最后達(dá)到目標(biāo)點(diǎn)。以下將從傳感器到算法原理,解讀機(jī)器人如何實(shí)現(xiàn)視覺避障。

避障常用哪些傳感器?
不管是要進(jìn)行導(dǎo)航規(guī)劃還是避障,感知周邊環(huán)境信息是第一步。就避障來說,移動(dòng)機(jī)器人需要通過傳感器 實(shí)時(shí)獲取自身周圍障礙物信息,包括尺寸、形狀和位置等信息。避障使用的傳感器多種多樣,各有不同的原理和特點(diǎn),目前常見的主要有視覺傳感器、激光傳感器、紅外傳感器、超聲波傳感器等。下面我簡單介紹一下這幾種傳感器的基本工作原理。
超聲波
超聲波傳感器的基本原理是測量超聲波的飛行時(shí)間,通過d=vt/2測量距離,其中d是距離,v是聲速,t是 飛行時(shí)間。由于超聲波在空氣中的速度與溫濕度有關(guān),在比較精確的測量中,需把溫濕度的變化和其它因素考慮進(jìn)去。
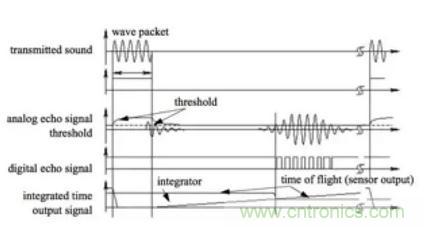
上面這個(gè)圖就是超聲波傳感器信號(hào)的一個(gè)示意。通過壓電或靜電變送器產(chǎn)生一個(gè)頻率在幾十kHz的超聲波脈沖組成波包,系統(tǒng)檢測高于某閾值的反向聲波,檢測到后使用測量到的飛行時(shí)間計(jì)算距離。超聲波傳感器一般作用距離較短,普通的有效探測距離都在幾米,但是會(huì)有一個(gè)幾十毫米左右的最小探測盲區(qū)。由于超聲傳感器的成本低、實(shí)現(xiàn)方法簡單、技術(shù)成熟,是移動(dòng)機(jī)器人中常用的傳感器。超聲波傳感器也有一些缺點(diǎn),首先看下面這個(gè)圖。
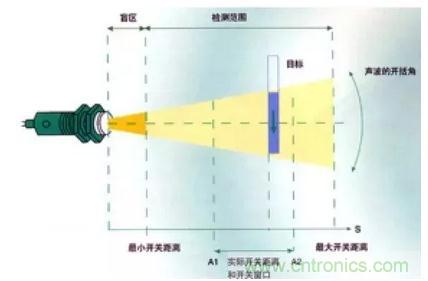
因?yàn)槁曇羰清F形傳播的,所以我們實(shí)際測到的距離并不是 一個(gè)點(diǎn),而是某個(gè)錐形角度范圍內(nèi)最近物體的距離。
另外,超聲波的測量周期較長,比如3米左右的物體,聲波傳輸這么遠(yuǎn)的距離需要約20ms的時(shí)間。再者,不同材料對聲波的反射或者吸引是不相同的,還有多個(gè)超聲傳感器之間有可能會(huì)互相干擾,這都是實(shí)際應(yīng)用的過程中需要考慮的。
紅外
一般的紅外測距都是采用三角測距的原理。紅外發(fā)射器按照一定角度發(fā)射紅外光束,遇到物體之后,光會(huì)反向回來,檢測到反射光之后,通過結(jié)構(gòu)上的幾何三角關(guān)系,就可以計(jì)算出物體距離D。
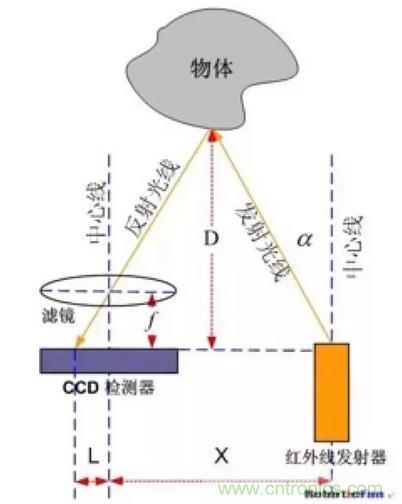
當(dāng)D的距離足夠近的時(shí)候,上圖中L值會(huì)相當(dāng)大,如果超過CCD的探測范圍,這時(shí),雖然物體很近,但是傳感器反而看不到了。當(dāng)物體距離D很大時(shí),L值就會(huì)很小,測量量精度會(huì)變差。因此,常見的紅外傳感器 測量距離都比較近,小于超聲波,同時(shí)遠(yuǎn)距離測量也有最小距離的限制。另外,對于透明的或者近似黑體的物體,紅外傳感器是無法檢測距離的。但相對于超聲來說,紅外傳感器具有更高的帶寬。
激光
常見的激光雷達(dá)是基于飛行時(shí)間的(ToF,time of flight),通過測量激光的飛行時(shí)間來進(jìn)行測距d=ct/2,類似于前面提到的超聲測距公式,其中d是距離,c是光速,t是從發(fā)射到接收的時(shí)間間隔。激光雷達(dá)包括發(fā)射器和接收器 ,發(fā)射器用激光照射目標(biāo),接收器接收反向回的光波。機(jī)械式的激光雷達(dá)包括一個(gè)帶有鏡子的機(jī)械機(jī)構(gòu),鏡子的旋轉(zhuǎn)使得光束可以覆蓋 一個(gè)平面,這樣我們就可以測量到一個(gè)平面上的距離信息。
對飛行時(shí)間的測量也有不同的方法,比如使用脈沖激光,然后類似前面講的超聲方案,直接測量占用的時(shí)間,但因?yàn)楣馑龠h(yuǎn)高于聲速,需要非常高精度的時(shí)間測量元件,所以非常昂貴;另一種發(fā)射調(diào)頻后的連續(xù)激光波,通過測量接收到的反射波之間的差頻來測量時(shí)間。
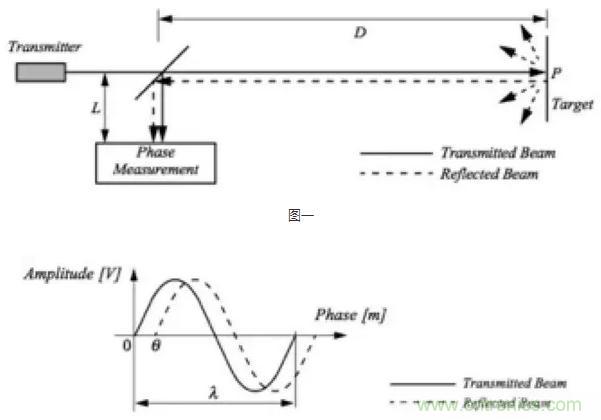
比較簡單的方案是測量反射光的相移,傳感器以已知的頻率發(fā)射一定幅度的調(diào)制光,并測量發(fā)射和反向信號(hào)之間的相移,如上圖一。調(diào)制信號(hào)的波長為lamda=c/f,其中c是光速,f是調(diào)制頻率,測量到發(fā)射和反射光束之間的相移差theta之后,距離可由lamda*theta/4pi計(jì)算得到,如上圖二。
激光雷達(dá)的測量距離可以達(dá)到幾十米甚至上百米,角度分辨率高,通??梢赃_(dá)到零點(diǎn)幾度,測距的精度也高。但測量距離的置信度會(huì)反比于接收信號(hào)幅度的平方,因此,黑體或者遠(yuǎn)距離的物體距離測量不會(huì)像光亮的、近距離的物體那么好的估計(jì)。并且,對于透明材料,比如玻璃,激光雷達(dá)就無能為力了。還有,由于結(jié)構(gòu)的復(fù)雜、器件成本高,激光雷達(dá)的成本也很高。
一些低端的激光雷達(dá)會(huì)采用三角測距的方案進(jìn)行測距。但這時(shí)它們的量程會(huì)受到限制,一般幾米以內(nèi),并且精度相對低一些,但用于室內(nèi)低速環(huán)境的SLAM或者在室外環(huán)境只用于避障的話,效果還是不錯(cuò)的。
視覺
常用的計(jì)算機(jī)視覺方案也有很多種, 比如雙目視覺,基于TOF的深度相機(jī),基于結(jié)構(gòu)光的深度相機(jī)等。深度相機(jī)可以同時(shí)獲得RGB圖和深度圖,不管是基于TOF還是結(jié)構(gòu)光,在室外強(qiáng)光環(huán)境下效果都并不太理想,因?yàn)樗鼈兌际切枰鲃?dòng)發(fā)光的。
像基于結(jié)構(gòu)光的深度相機(jī),發(fā)射出的光會(huì)生成相對隨機(jī)但又固定的斑點(diǎn)圖樣,這些光斑打在物體上后,因?yàn)榕c攝像頭距離不同,被攝像頭捕捉到的位置也不相同,之后先計(jì)算拍到的圖的斑點(diǎn)與標(biāo)定的標(biāo)準(zhǔn)圖案在不同位置的偏移,利用攝像頭位置、傳感器大小等參數(shù)就可以計(jì)算出物體與攝像頭的距離。而我們目前的E巡機(jī)器人主要是工作在室外環(huán)境,主動(dòng)光源會(huì)受到太陽光等條件的很大影響,所以雙目視覺這種被動(dòng)視覺方案更適合,因此我們采用的視覺方案是基于雙目視覺的。
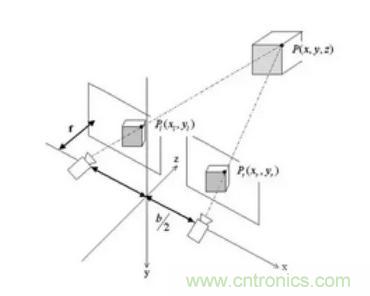
雙目視覺的測距本質(zhì)上也是三角測距法,由于兩個(gè)攝像頭的位置不同,就像我們?nèi)说膬芍谎劬σ粯?,看到的物體不一樣。兩個(gè)攝像頭看到的同一個(gè)點(diǎn)P,在成像的時(shí)候會(huì)有不同的像素位置,此時(shí)通過三角測距就可以測出這個(gè)點(diǎn)的距離。與結(jié)構(gòu)光方法不同的是,結(jié)構(gòu)光計(jì)算的點(diǎn)是主動(dòng)發(fā)出的、已知確定的,而雙目算法計(jì)算的點(diǎn)一般是利用算法抓取到的圖像特征,如SIFT或SURF特征等,這樣通過特征計(jì)算出來的是稀疏圖。
要做良好的避障,稀疏圖還是不太夠的,我們需要獲得的是稠密的點(diǎn)云圖,整個(gè)場景的深度信息。稠密匹配的算法大致可以分為兩類,局部算法和全局算法。局部算法使用像素局部的信息來計(jì)算其深度,而全局算法采用圖像中的所有信息進(jìn)行計(jì)算。一般來說,局部算法的速度更快,但全局算法的精度更高。
這兩類各有很多種不同方式的具體算法實(shí)現(xiàn)。能過它們的輸出我們可以估算出整個(gè)場景中的深度信息,這個(gè)深度信息可以幫助我們尋找地圖場景中的可行走區(qū)域以及障礙物。整個(gè)的輸出類似于激光雷達(dá)輸出的3D點(diǎn)云圖,但是相比來講得到信息會(huì)更豐富,視覺同激光相比優(yōu)點(diǎn)是價(jià)格低很多,缺點(diǎn)也比較明顯,測量精度要差 一些,對計(jì)算能力的要求也高很多。當(dāng)然,這個(gè)精度差是相對的,在實(shí)用的過程中是完全足夠的,并且我們目前的算法在我們的平臺(tái)NVIDIA TK1和TX1上是可以做到實(shí)時(shí)運(yùn)行。

KITTI采集的圖
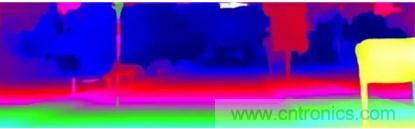
實(shí)際輸出的深度圖,不同的顏色代表不同的距離
在實(shí)際應(yīng)用的過程中,我們從攝像頭讀取到的是連續(xù)的視頻幀流,我們還可以通過這些幀來估計(jì)場景中 目標(biāo)物體的運(yùn)動(dòng),給它們建立運(yùn)動(dòng)模型,估計(jì)和預(yù)測它們的運(yùn)動(dòng)方向、運(yùn)動(dòng)速度,這對我們實(shí)際行走、避障規(guī)劃是很有用的。
以上幾種是最常見的幾種傳感器 ,各有其優(yōu)點(diǎn)和缺點(diǎn),在真正實(shí)際應(yīng)用的過程中,一般是綜合配置使用多種不同的傳感器 ,以最大化保證在各種不同的應(yīng)用和環(huán)境條件下,機(jī)器人都能正確感知到障礙物信息。我們公司的E巡機(jī)器人的避障方案就是以雙目視覺為主,再輔助以多種其他傳感器,保證機(jī)器人周邊360度空間立體范圍內(nèi)的障礙物都能被有效偵測到,保證機(jī)器人行走的安全性。
避障常用算法原理
在講避障算法之前,我們假定機(jī)器人已經(jīng)有了一個(gè)導(dǎo)航規(guī)劃算法對自己的運(yùn)動(dòng)進(jìn)行規(guī)劃,并按照規(guī)劃的路徑行走。避障算法的任務(wù)就是在機(jī)器人執(zhí)行正常行走任務(wù)的時(shí)候,由于傳感器的輸入感知到了障礙物的存在,實(shí)時(shí)地更新目標(biāo)軌跡,繞過障礙物。
Bug算法知乎用戶無方表示
Bug算法應(yīng)該是最簡單的一種避障算法了,它的基本思想是在發(fā)現(xiàn)障礙后,圍著檢測到的障礙物輪廓行走,從而繞開它。Bug算法目前有很多變種, 比如Bug1算法,機(jī)器人首先完全地圍繞物體,然后從距目標(biāo)最短距離的點(diǎn)離開。Bug1算法的效率很低,但可以保證機(jī)器人達(dá)到目標(biāo)。
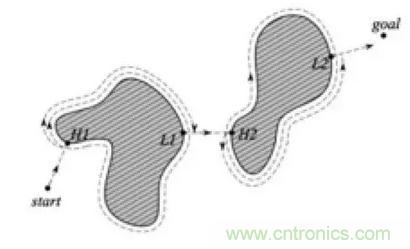
Bug1算法示例
改進(jìn)后的Bug2算法中,機(jī)器人開始時(shí)會(huì)跟蹤物體的輪廓,但不會(huì)完全圍繞物體一圈,當(dāng)機(jī)器人可以直接移動(dòng)至目標(biāo)時(shí),就可以直接從障礙分離,這樣可以達(dá)到比較短的機(jī)器人行走總路徑。
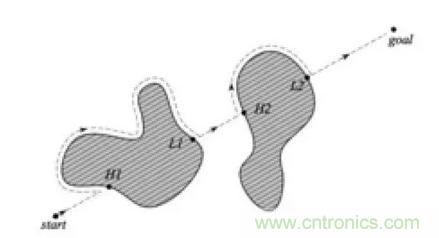
Bug2算法示例
除此之外,Bug算法還有很多其他的變種, 比如正切Bug算法等等。在許多簡單的場景中,Bug算法是實(shí)現(xiàn)起來比較容易和方便的,但是它們并沒有考慮到機(jī)器人的動(dòng)力學(xué)等限制,因此在更復(fù)雜的實(shí)際環(huán)境中就不是那么可靠好用了。
勢場法(PFM)
實(shí)際上,勢場法不僅僅可以用來避障,還可以用來進(jìn)行路徑的規(guī)劃。勢場法把機(jī)器人處理在勢場下的 一個(gè)點(diǎn),隨著勢場而移動(dòng),目標(biāo)表現(xiàn)為低谷值,即對機(jī)器人的吸引力,而障礙物扮演的勢場中的一個(gè)高峰,即斥力,所有這些力迭加于機(jī)器人身上,平滑地引導(dǎo)機(jī)器人走向目標(biāo),同時(shí)避免碰撞已知的障礙物。當(dāng)機(jī)器人移動(dòng)過程中檢測新的障礙物,則需要更新勢場并重新規(guī)劃。
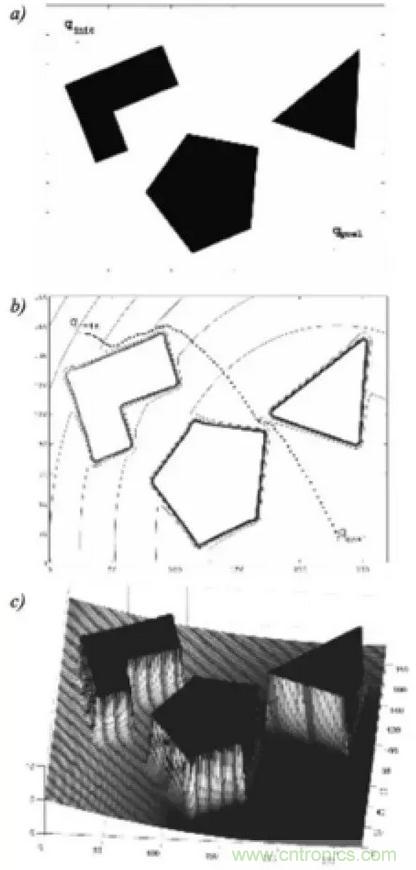
上面這個(gè)圖是勢場比較典型的示例圖,最上的圖a左上角是出發(fā)點(diǎn),右下角是目標(biāo)點(diǎn),中間三個(gè)方塊是障礙物。中間的圖b就是等勢位圖,圖中的每條連續(xù)的線就代表了一個(gè)等勢位的一條線,然后虛線表示的在整個(gè)勢場里面所規(guī)劃出來的一條路徑,我們的機(jī)器人是沿著勢場所指向的那個(gè)方向一直行走,可以看見它會(huì)繞過這個(gè)比較高的障礙物。
最下面的圖,即我們整個(gè)目標(biāo)的吸引力還有我們所有障礙物產(chǎn)生的斥力最終形成的一個(gè)勢場效果圖,可以看到機(jī)器人從左上角的出發(fā)點(diǎn)出發(fā),一路沿著勢場下降的方向達(dá)到最終的目標(biāo)點(diǎn),而每個(gè)障礙物勢場表現(xiàn)出在很高的平臺(tái),所以,它規(guī)劃出來的路徑是不會(huì)從這個(gè)障礙物上面走的。
一種擴(kuò)展的方法在基本的勢場上附加了了另外兩個(gè)勢場:轉(zhuǎn)運(yùn)勢場和任務(wù)勢場。它們額外考慮了由于機(jī)器人本身運(yùn)動(dòng)方向、運(yùn)動(dòng)速度等狀態(tài)和障礙物之間的相互影響。
轉(zhuǎn)動(dòng)勢場考慮了障礙與機(jī)器人的相對方位,當(dāng)機(jī)器人朝著障礙物行走時(shí),增加斥力, 而當(dāng)平行于物體行走時(shí),因?yàn)楹苊黠@并不會(huì)撞到障礙物,則減小斥力。任務(wù)勢場則排除了那些根據(jù)當(dāng)前機(jī)器人速度不會(huì)對近期勢能造成影響的障礙,因此允許規(guī)劃出 一條更為平滑的軌跡。
另外還有諧波勢場法等其他改進(jìn)方法。勢場法在理論上有諸多局限性, 比如局部最小點(diǎn)問題,或者震蕩性的問題,但實(shí)際應(yīng)用過程中效果還是不錯(cuò)的,實(shí)現(xiàn)起來也比較容易。
向量場直方圖(VFH)
它執(zhí)行過程中針對移動(dòng)機(jī)器人當(dāng)前周邊環(huán)境創(chuàng)建了一個(gè)基于極坐標(biāo)表示的局部地圖,這個(gè)局部使用柵格圖的表示方法,會(huì)被最近的一些傳感器數(shù)據(jù)所更新。VFH算法產(chǎn)生的極坐標(biāo)直方圖如圖所示:
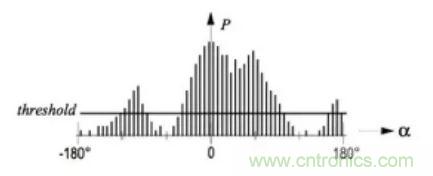
圖中x軸是以機(jī)器人為中心感知到的障礙物的角度,y軸表示在該方向存在障礙物的概率大小p。實(shí)際應(yīng)用的過程中會(huì)根據(jù)這個(gè)直方圖首先辨識(shí)出允許機(jī)器人通過的足夠大的所有空隙,然后對所有這些空隙計(jì)算其代價(jià)函數(shù),最終選擇具有最低代價(jià)函數(shù)的通路通過。
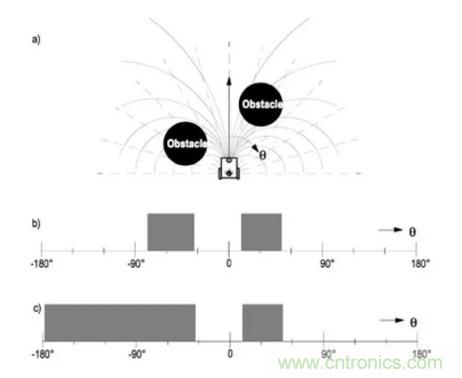
代價(jià)函數(shù)受三個(gè)因素影響: 目標(biāo)方向、機(jī)器人當(dāng)前方向、之前選擇的方向,最終生成的代價(jià)是這三個(gè)因素的加權(quán)值,通過調(diào)節(jié)不同的權(quán)重可以調(diào)整機(jī)器人的選擇偏好。VFH算法也有其他的擴(kuò)展和改進(jìn),比如在VFH+算法中,就考慮了機(jī)器人運(yùn)動(dòng)學(xué)的限制。由于實(shí)際底層運(yùn)動(dòng)結(jié)構(gòu)的不同,機(jī)器的實(shí)際運(yùn)動(dòng)能力是受限的,比如汽車結(jié)構(gòu),就不能隨心所欲地原地轉(zhuǎn)向等。VFH+算法會(huì)考慮障礙物對機(jī)器人實(shí)際運(yùn)動(dòng)能力下軌跡的阻擋效應(yīng),屏蔽掉那些雖然沒有被障礙物占據(jù)但由于其阻擋實(shí)際無法達(dá)到的運(yùn)動(dòng)軌跡。我們的E巡機(jī)器人采用的是兩輪差動(dòng)驅(qū)動(dòng)的運(yùn)動(dòng)形式,運(yùn)動(dòng)非常靈活,實(shí)際應(yīng)用較少受到這些因素的影響。
具體可以看 一下這個(gè)圖示:
類似這樣傳統(tǒng)的避障方法還有很多,除此之外,還有許多其他的智能避障技術(shù),比如神經(jīng)網(wǎng)絡(luò)、模糊邏輯等。
神經(jīng)網(wǎng)絡(luò)方法對機(jī)器人從初始位置到目標(biāo)位置的整個(gè)行走路徑進(jìn)行訓(xùn)練建模,應(yīng)用的時(shí)候,神經(jīng)網(wǎng)絡(luò)的輸 入為之前機(jī)器人的位姿和速度以及傳感器的輸 入,輸出期望的下一目標(biāo)或運(yùn)動(dòng)方向。
模糊邏輯方法核心是模糊控制器,需要將專家的知識(shí)或操作人員的經(jīng)驗(yàn)寫成多條模糊邏輯語句,以此控制機(jī)器人的避障過程。 比如這樣的模糊邏輯:第一條,若右前方較遠(yuǎn)處檢測到障礙物,則稍向左轉(zhuǎn);第 二條,若右前方較近處檢測到障礙物,則減速并向左轉(zhuǎn)更多角度等。




