

【導(dǎo)讀】MAV由于體積和負(fù)載能力極為有限,因此,減小和減輕飛控導(dǎo)航系統(tǒng)的體積及重量,就顯得尤為重要。本文基于MEMS加速度傳感器,設(shè)計(jì)一種雙軸傾角計(jì),該裝置精度高、重量輕,可滿足MAV的姿態(tài)角測(cè)量要求,也可用于其他需要體積小、重量輕的傾角測(cè)量設(shè)備上。
MEMS加速度傳感器
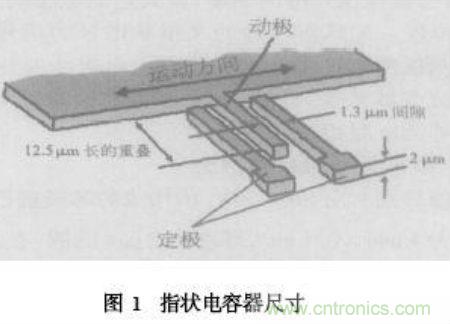
ADXL202是最新的、低重力加速度雙軸表面微機(jī)械加工的加速度計(jì),以模擬量和脈寬調(diào)制數(shù)字量2種方式輸出,并具有極低的功耗和噪音。表面微機(jī)械加工使加速度傳感器、信號(hào)處理電路高度集成于一個(gè)硅片上。和所有加速度計(jì)一樣,傳感器單元是差動(dòng)電容器,其輸出與加速度成比例。加速度計(jì)的性能依賴于傳感器的結(jié)構(gòu)設(shè)計(jì)。差動(dòng)電容是由懸臂梁構(gòu)成,而懸臂梁是由很多相間分布的指狀電容電極副構(gòu)成,一副指狀電容電極可簡(jiǎn)化為圖1所示的結(jié)構(gòu)。每個(gè)指狀電極的電容正比例于固定電極和移動(dòng)電極之間的重疊面積以及移動(dòng)電極的位移。顯然,這些都是很小的電容器,并且,為了降低噪聲和提高分辨力,實(shí)際上需要盡可能大的差動(dòng)電容。
懸臂梁的運(yùn)動(dòng)是由支撐它的多晶硅彈簧控制。這些彈簧和懸臂梁的質(zhì)量遵守牛頓第二定律:質(zhì)量為m 的物體,因受力F而產(chǎn)生加速度a,則F =m a。而彈簧的形變與所受力的大小成比例,即F = kx,所以
x = (m / k) a ,
式中 x為位移, m; m 為質(zhì)量, kg; a為加速度, m / s2 ; k為彈簧剛度系數(shù), N /m。
因此,僅有支撐彈簧的剛度和懸臂梁的質(zhì)量2個(gè)參數(shù)是可控的。減小彈簧系數(shù)似乎是提高懸臂梁靈敏度的一種容易方法,但懸臂梁的共振頻率正比例于彈簧系數(shù),所以, 減小彈簧系數(shù)導(dǎo)致懸臂梁共振頻率降低,而加速度計(jì)必須工作在共振頻率之下。此外,增大彈簧系數(shù)使懸臂梁更堅(jiān)固。所以,如果保持盡可能高的彈簧系數(shù),只有懸臂梁的質(zhì)量參數(shù)是可變化的。通常,增大質(zhì)量意味著增大傳感器的面積,從而使懸臂梁增大。在ADXL202中,設(shè)計(jì)出一個(gè)新穎的懸臂梁結(jié)構(gòu)。構(gòu)成X軸和Y軸可變電容的指狀電極沿著一個(gè)正方形四周的懸臂梁集成,從而使整個(gè)傳感器的面積減小,而且,共用的大質(zhì)量的懸臂梁提高了ADXL202的分辨力。位于懸臂梁四角的彈簧懸掛系統(tǒng)用以使X 軸和Y軸的靈敏度耦合減小到最小。
傾角測(cè)量原理
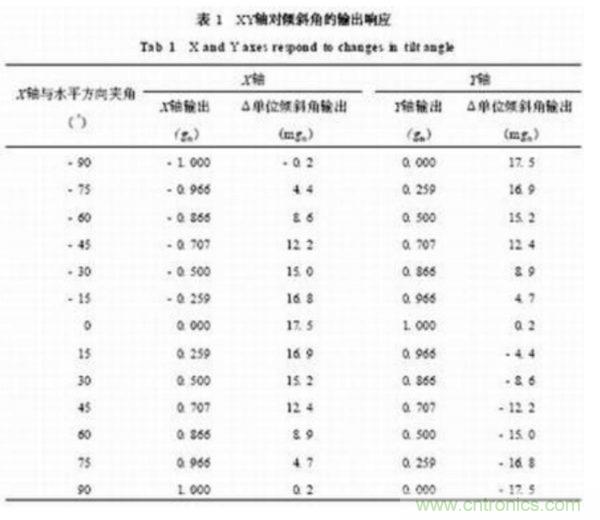
ADXL202用于傾角測(cè)量是最典型的應(yīng)用之一,它以重力作為輸入矢量來決定物體在空間的方向。當(dāng)重力與其敏感軸垂直時(shí),它對(duì)傾斜最敏感,在該方位上其對(duì)傾角的靈敏度最高。當(dāng)敏感軸與重力平行時(shí),每?jī)A斜1 °所引起輸出加速度的變化被忽略。當(dāng)加速度計(jì)敏感軸與重力垂直時(shí),每?jī)A斜1 °所引起輸出加速度的變化約為17. 5mgn ,但在45°時(shí),每?jī)A斜1 °所引起輸出加速度的變化僅為12. 5mgn ,而且,分辨力降低。表1為X, Y軸在鉛垂面內(nèi)傾斜±90 °時(shí),X, Y 軸的輸出。
當(dāng)該加速度計(jì)的X, Y軸都與重力方向垂直時(shí),可作為具有滾轉(zhuǎn)角和俯仰角的雙軸傾角傳感器。一旦加速度計(jì)的輸出信號(hào)被轉(zhuǎn)化為一個(gè)加速度, 該加速度將位于- 1 gn 和+ 1 gn 之間。則傾斜角以度表示可按下式計(jì)算
θ= arcsin (AX / gn )
γ= arcsin (AY / gn ) ,
式中 θ,γ分別為俯仰角和滾轉(zhuǎn)角, ( °) ; AX , AY 分別為加速度傳感器X軸和Y軸輸出, gn。
傾角測(cè)量電路
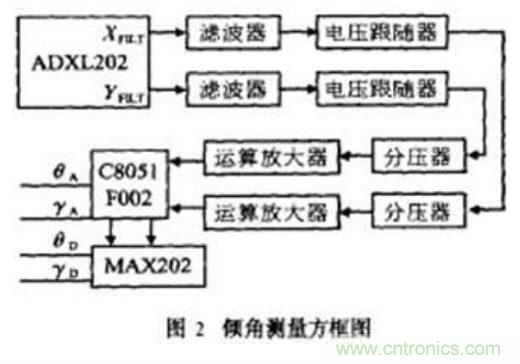
測(cè)量電路方框圖如圖2所示, ADXL202輸出的電壓首先經(jīng)低通濾波器慮波,再經(jīng)電壓跟隨器進(jìn)行阻抗匹配。當(dāng)X, Y軸均處于水平位置時(shí),兩路輸出電壓經(jīng)分壓器分壓后為1. 2V,當(dāng)X, Y軸分別從- 90°轉(zhuǎn)到+ 90°時(shí),經(jīng)過放大后的電壓從0V變到+ 2. 4V,以適應(yīng)單片機(jī)C8051F002的A /D轉(zhuǎn)換器的需要,然后,用單片機(jī)進(jìn)行線性化處理和溫度補(bǔ)償,分別以模擬量從D /A轉(zhuǎn)換器DAC0,DAC1輸出,并以θA 表示俯仰角的模擬量輸出,γB 表示滾轉(zhuǎn)角的模擬量輸出;同時(shí),俯仰角和滾轉(zhuǎn)角轉(zhuǎn)換為數(shù)字量從串行口RS232以數(shù)字量度輸出,分別為θD 和γD。
實(shí)驗(yàn)結(jié)果
在傾角計(jì)線性化和溫度補(bǔ)償后,進(jìn)行了量程范圍內(nèi)的測(cè)量,所用設(shè)備為三坐標(biāo)測(cè)量?jī)x工作臺(tái)作為水平基準(zhǔn),200mm正弦規(guī)及千分塊規(guī)作為角度發(fā)生器產(chǎn)生基準(zhǔn)角度,通過串口連接傾角計(jì)于計(jì)算機(jī)顯示傾角計(jì)所測(cè)角度。由于三坐標(biāo)測(cè)量?jī)x工作臺(tái)的水平度及正弦規(guī)和千分塊規(guī)所產(chǎn)生角度精度足夠高,認(rèn)為所產(chǎn)生的角度誤差極小,可作為角度的期望值。測(cè)量結(jié)果如表2所示。

從表2可以算出:傾角最大誤差為- 0. 26°~0. 25°,而平均角度誤差為±0. 135°, 分別為滿量程的0. 57 %和0. 30 %。

結(jié) 論
本文利用MEMS雙軸加速度傳感器設(shè)計(jì)的雙軸傾角計(jì),體積小、重量輕(約10 g) ,線性化及溫度補(bǔ)償后的測(cè)量結(jié)果表明: 在測(cè)量范圍±45°內(nèi), 最大誤差為滿量程的0. 57 % ,平均誤差為滿量程的0. 30 %。
該傾角計(jì)很好地滿足了MAV姿態(tài)控制時(shí)滾轉(zhuǎn)角、俯仰角測(cè)量要求。同時(shí),該傾角計(jì)也可以用于要求體積小、重量輕的其他測(cè)量設(shè)備上。
推薦閱讀:



