
【導(dǎo)讀】在工業(yè)和自動化領(lǐng)域,越來越多的新興應(yīng)用采用毫米波方案,大多選用的是24GHz和60GHz——這兩個頻段免費,且在很多國家屬于定義明確的頻段。在谷歌Project Soli追蹤“亞毫米精度”的手勢識別之后,各應(yīng)用就開始“嘗鮮”。
2017年有超過2億顆24GHz BSD(盲點偵測)傳感器出貨,如圖1全球24GHz BSD(盲點偵測)需求趨勢所示。其中現(xiàn)有上量的源頭是來自于汽車工業(yè)。
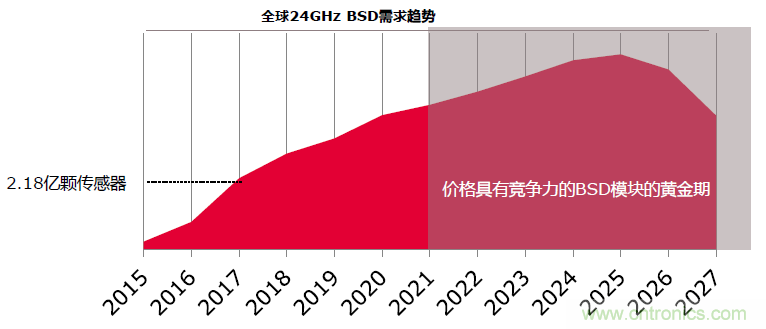
圖1:全球24GHz BSD需求趨勢。(圖片來源:英飛凌半導(dǎo)體)
每個國家對從2.4GHz到200GHz這些頻段都有不同的定義,現(xiàn)在微波爐應(yīng)用集中在是2.4GHz、5G部分有sub-4GHz、汽車是77GHz。
在工業(yè)和自動化領(lǐng)域,越來越多的新興應(yīng)用采用毫米波解決方案進行感測,大多選用的是24GHz和60GHz,這個頻段已經(jīng)被分配給工業(yè)領(lǐng)域免費使用,在各個不同的國家和法規(guī)上面屬于定義明確的頻段。如圖2所示:

圖2:雷達的頻段越高,波長越短,波長越短,它的分辨率和準確度會越高,這是雷達波的特性。(圖片來源:英飛凌半導(dǎo)體)
其中,24GHz在空間和運動的感測方面,被廣泛的用于智慧家庭、智能開門系統(tǒng)、智慧建筑、工業(yè)機器人或者是智慧型工業(yè)等。

圖3:借助24GHz雷達實現(xiàn)空間和運動感測。
60Ghz則頻率更高波長更短,除了上述應(yīng)用,還適合做一些生命特征感測。“我們的客戶有人通過雷達偵測心跳或者是呼吸。”英飛凌電源管理及多元化市場事業(yè)部大中華區(qū)射頻及傳感器部門總監(jiān)麥正奇在第七屆EEVIA年度中國ICT媒體論壇暨2018產(chǎn)業(yè)和技術(shù)展望研討會上指出,“它的探測距離可以更遠,因為天線設(shè)計比較靈活,能夠為不同場景做不同的天線設(shè)計。”
高頻段的天線大小可以設(shè)計的比較小一點,對光或者外界環(huán)境不受干擾,用于人機互動有著比較先天的優(yōu)勢。
“60GHz是穿透性,所以你可以將其設(shè)計在產(chǎn)品下面,針對物品移動或者手勢變化,其7GHz的帶寬可以更精準做出偵測或回饋。”麥正奇指出,“它可以用在非接觸手勢控制,例如實現(xiàn)可穿戴設(shè)備的手勢控制。”
如果把60GHz集成在智能音箱里面,那么可以用來偵測人的近/遠,或者人的手勢變化,從而實現(xiàn)更好的人機交互。

圖4:借助60GHz雷達實現(xiàn)空間和運動感測。
“我們做出來的60GHz很多是手勢識別應(yīng)用,它的距離可能是30公分以內(nèi),但如果在天線的設(shè)計上面有做改變,它距離可達10米以上。”麥正奇指出。
谷歌和英飛凌的合作項目Project Soli,就是利用英飛凌提供的60GHz雷達傳感器監(jiān)測空中手勢動作,從而追蹤亞毫米精準度的高速運動。去年,英飛凌開始優(yōu)化第二代微波天線集成雷達手勢識別傳感器Soli-C。
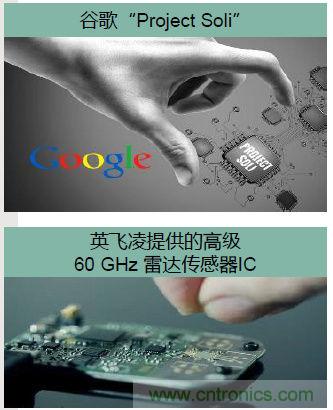
圖5:谷歌和英飛凌的合作項目Project Soli。
雷達在應(yīng)用領(lǐng)域有著無限的可能,在中國市場,EDN電子技術(shù)設(shè)計已經(jīng)報道了不少24GHz/60GHz的方案在安防應(yīng)用、盲點偵測和智能家居應(yīng)用中的成功案例。
“我們每天都會看到一些新的應(yīng)用,包括醫(yī)療、工業(yè)、或者人機交互。如果我很單純以生意或市場層面以量作為考量,我認為最大的應(yīng)用可能是人機交互或者手機。”麥正奇透露。
毫米波雷達的挑戰(zhàn)
毫米波的首要挑戰(zhàn),是面對已有的競爭技術(shù),畢竟業(yè)界已經(jīng)有紅外線、激光雷達等解決方案在市場站穩(wěn)了腳跟。
其次就是定制化算法。不同的應(yīng)用要有不同的算法,不同的算法要有不同的專家來做研發(fā),這為設(shè)計帶來了門檻,。
還有就是法規(guī)。毫米波是一個比較高頻的頻段,在其無線電規(guī)范上每個國家/地區(qū)所制定的法規(guī)和后面的政策還沒有完整的被定義,尤其是那些還沒有真正被大量使用的波段。這些都是需要進一步跟進和探討的。
附錄:關(guān)于雷達的原理和實現(xiàn)方式
雷達利用無線電波來探測存在、方向、距離和速度,除了汽車,這些用途可以拿來做很多不同的應(yīng)用。

速度——利用多普勒效應(yīng)可以計算出移動的速度;
范圍/目標距離——利用電磁波或者是FSK等方式去做一些演算;
角度/目標方向——根據(jù)天線的相位差計算出;
目標位置——根據(jù)一些調(diào)頻連續(xù)波FMCW的演算方式來計算出。
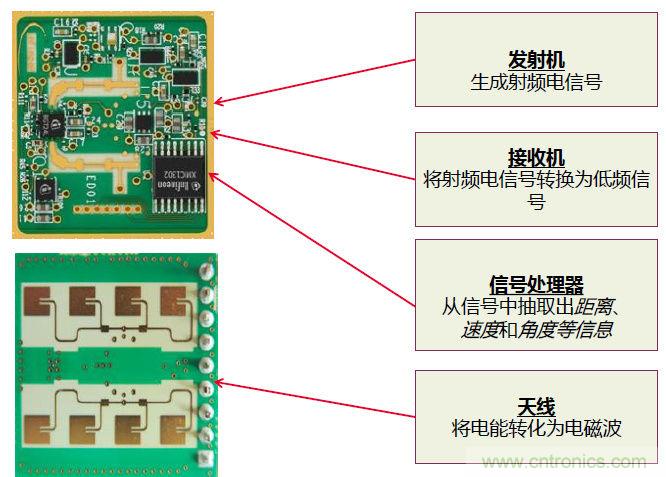
雷達的硬件部分,包括發(fā)射器、接收器、以及信號處理,下圖中板子的背面做了天線,負責把電能轉(zhuǎn)化成電磁波。
雷達在硬件上面完成之后,很重要的一部分是怎么去演算和應(yīng)用這些演算法得到想要的結(jié)果,軟件也是雷達最主要的方面。還有必須的GUI界面。這兩部分是除了硬件之外必須要有的工具。
取決于雷達功能和雷達可支持的運行模式,雷達可以在多種不同模式下工作。下面列出了三種主要的工業(yè)雷達運行模式。

未來演算法還會不斷地增加,復(fù)雜度也會不斷地增加。
本文轉(zhuǎn)載自電子技術(shù)設(shè)計。
推薦閱讀:



