

【導(dǎo)讀】加速度計(jì)能夠測(cè)量加速度、傾斜、振動(dòng)或沖擊,因此適用于從可穿戴健身裝置到工業(yè)平臺(tái)穩(wěn)定系統(tǒng)的廣泛應(yīng)用。市場(chǎng)上有成百上千的加速度計(jì)器件可供選擇,其成本和性能各不相同。本文第一部分討論設(shè)計(jì)人員需要知道的關(guān)鍵參數(shù)和特性,以及它們與傾斜和穩(wěn)定應(yīng)用的關(guān)系,從而幫助設(shè)計(jì)人員選擇最合適的加速度計(jì)。第二部分將重點(diǎn)關(guān)注可穿戴設(shè)備、狀態(tài)監(jiān)控(CBM)和物聯(lián)網(wǎng)應(yīng)用。
最新MEMS電容式加速度計(jì)應(yīng)用于傳統(tǒng)上由壓電加速度計(jì)和其他傳感器主導(dǎo)的應(yīng)用領(lǐng)域。新一代MEMS加速度計(jì)可為CBM、結(jié)構(gòu)健康監(jiān)控(SHM)、資產(chǎn)健康監(jiān)控(AHM)、生命體征監(jiān)測(cè)(VSM)和物聯(lián)網(wǎng)無(wú)線(xiàn)傳感器網(wǎng)絡(luò)等應(yīng)用提供解決方案。然而,在有如此多加速度計(jì)和如此多應(yīng)用的情況下,選擇合適的加速度計(jì)并非易事。
尚無(wú)行業(yè)標(biāo)準(zhǔn)界定加速度計(jì)屬于何種類(lèi)別。加速度計(jì)的一般分類(lèi)及相應(yīng)的應(yīng)用如表1所示。所示的帶寬和g值范圍是加速度計(jì)用在所列終端應(yīng)用中的典型值。

表1. 加速度計(jì)等級(jí)和典型應(yīng)用領(lǐng)域
圖1顯示了各種MEMS加速度計(jì)的快照,并依據(jù)特定應(yīng)用的主要性能指標(biāo)和智能/集成水平將各傳感器歸類(lèi)。本文的一個(gè)重要關(guān)注對(duì)象是基于增強(qiáng)型MEMS結(jié)構(gòu)和信號(hào)處理的新一代加速度計(jì)以及世界一流的封裝技術(shù),其穩(wěn)定性和噪聲性能可與更昂貴的專(zhuān)門(mén)器件相媲美,而功耗更低。這些特性及加速度計(jì)的其他關(guān)鍵規(guī)格將在下文依據(jù)應(yīng)用相關(guān)性加以詳細(xì)討論。
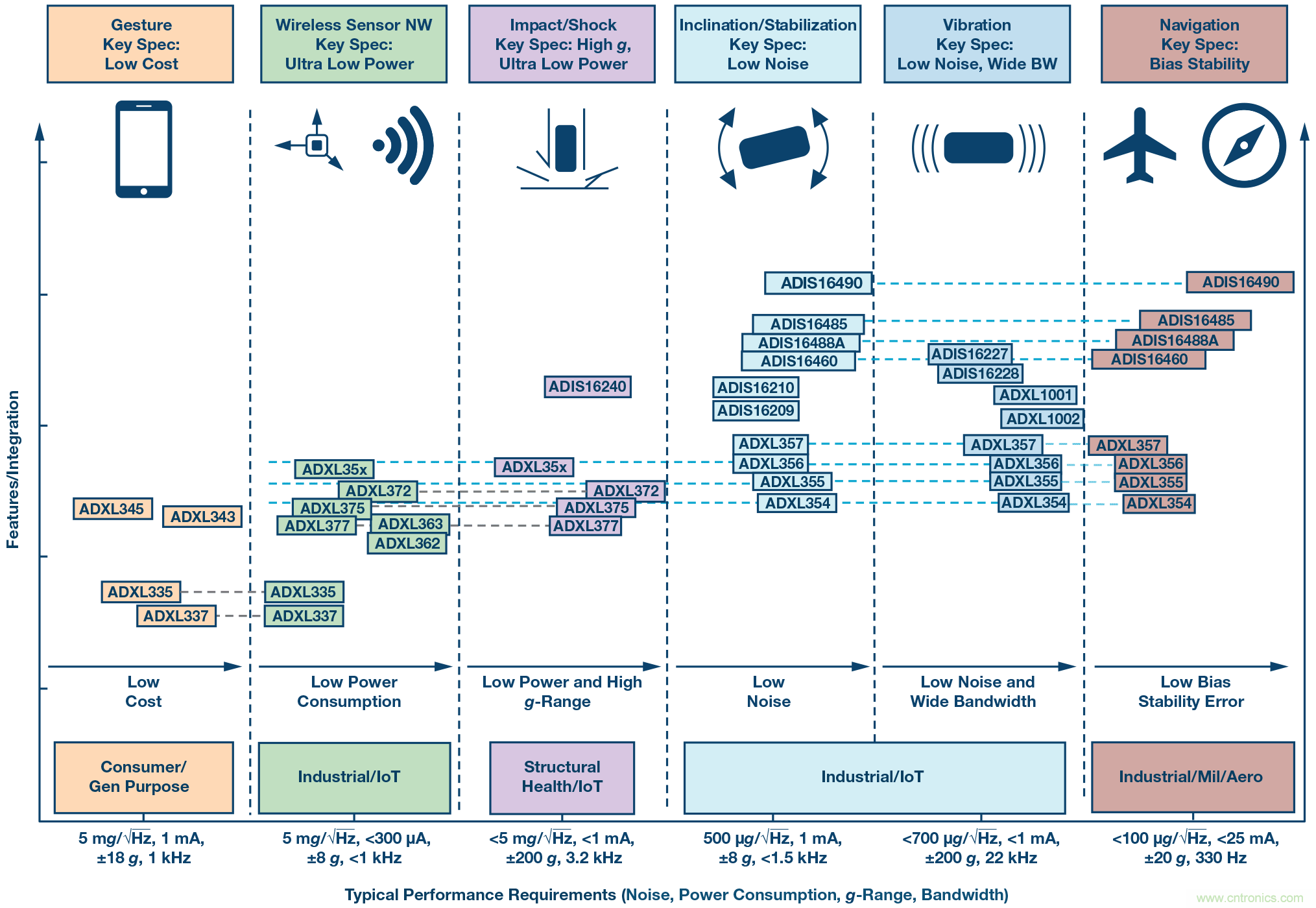
圖1. ADI公司精選MEMS加速度計(jì)的應(yīng)用版圖
傾斜檢測(cè)
主要標(biāo)準(zhǔn):偏置穩(wěn)定度、失調(diào)溫漂、低噪聲、可重復(fù)性、振動(dòng)校 正、跨軸靈敏度。
對(duì)MEMS電容式加速度計(jì)而言,精確的傾斜檢測(cè)是一種要求頗高的應(yīng)用,尤其是在有振動(dòng)的情況下。在動(dòng)態(tài)環(huán)境中利用MEMS電容式加速度計(jì)實(shí)現(xiàn)0.1°的傾斜精度非常困難——<1°很困難,>1°較易實(shí)現(xiàn)。為使加速度計(jì)有效測(cè)量?jī)A斜度,必須對(duì)傳感器性能和終端應(yīng)用環(huán)境有很好的了解。相比于動(dòng)態(tài)環(huán)境,靜態(tài)環(huán)境對(duì)傾斜測(cè)量更加有利,因?yàn)檎駝?dòng)或沖擊可能會(huì)破壞傾斜數(shù)據(jù),引起嚴(yán)重測(cè)量誤差。傾斜測(cè)量的最重要特性有溫度系數(shù)失調(diào)、遲滯、低噪聲、短期/長(zhǎng)期穩(wěn)定性、可重復(fù)性和良好的振動(dòng)校正。
0 g偏置精度、焊接引起的0 g偏置漂移、PCB外殼對(duì)準(zhǔn)引起的0 g偏置漂移、0 g偏置溫度系數(shù)、靈敏準(zhǔn)確度和溫度系數(shù)、非線(xiàn)性度以及跨軸靈敏度等誤差,是可以觀(guān)測(cè)到的,并且可以通過(guò)裝配后校準(zhǔn)流程加以降低。遲滯、使用壽命期間的0 g偏置漂移、使用壽命期間的靈敏度漂移、潮濕引起的0 g漂移,以及溫度隨時(shí)間變化引起的PCB彎曲和扭轉(zhuǎn)等等,這些誤差項(xiàng)無(wú)法通過(guò)校準(zhǔn)或其他方法解決,需要通過(guò)一定程度的原位維修才能減少。
ADI公司的加速度計(jì)可分為MEMS (ADXLxxx)和iSensor® (ADIS16xxx)特殊用途器件兩類(lèi)。iSensor或智能傳感器是高集成度(4到10個(gè)自由度)且可編程器件,適用于動(dòng)態(tài)環(huán)境下的復(fù)雜應(yīng)用。這些高集成度即插即用解決方案包括全面的工廠(chǎng)校準(zhǔn)、嵌入式補(bǔ)償和信號(hào)處理,解決了上述需要原位維修的很多誤差,大大降低了設(shè)計(jì)和驗(yàn)證負(fù)擔(dān)。這種全面的工廠(chǎng)校準(zhǔn)為整個(gè)傳感器信號(hào)鏈提供額定溫度范圍(通常是−40°C至+85°C)內(nèi)的靈敏度和偏置特性。因此,每個(gè)iSensor器件都有其獨(dú)特的補(bǔ)償公式,安裝后可產(chǎn)生精確的測(cè)量結(jié)果。對(duì)于一些系統(tǒng),工廠(chǎng)校準(zhǔn)可免除系統(tǒng)級(jí)校準(zhǔn),大大簡(jiǎn)化操作。
iSensor器件專(zhuān)門(mén)針對(duì)某些應(yīng)用而開(kāi)發(fā)。例如,圖2所示的 ADIS16210 專(zhuān)門(mén)針對(duì)傾斜應(yīng)用而設(shè)計(jì)并定制,因此,它能提供<1°的相對(duì)精 度且開(kāi)箱即用。這主要?dú)w功于集成信號(hào)處理和特定器件校準(zhǔn),以 便實(shí)現(xiàn)最佳精度性能。iSensor器件將在穩(wěn)定性部分進(jìn)一步討論。
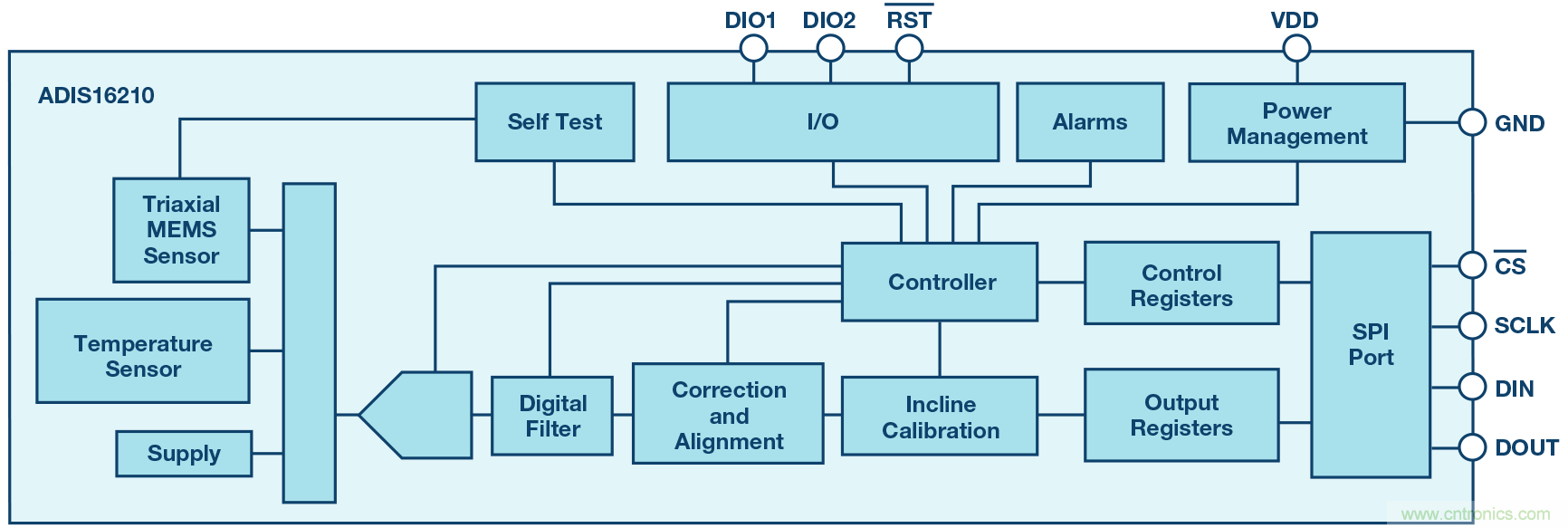
圖2. ADIS16210精密三軸傾斜
最新一代加速度計(jì)架構(gòu)(例如 ADXL355)提供更多功能(傾斜、狀態(tài)監(jiān)控、結(jié)構(gòu)健康、IMU/AHRS應(yīng)用),包含的集成模塊更少針對(duì)特定應(yīng)用,但功能豐富,如圖3所示。
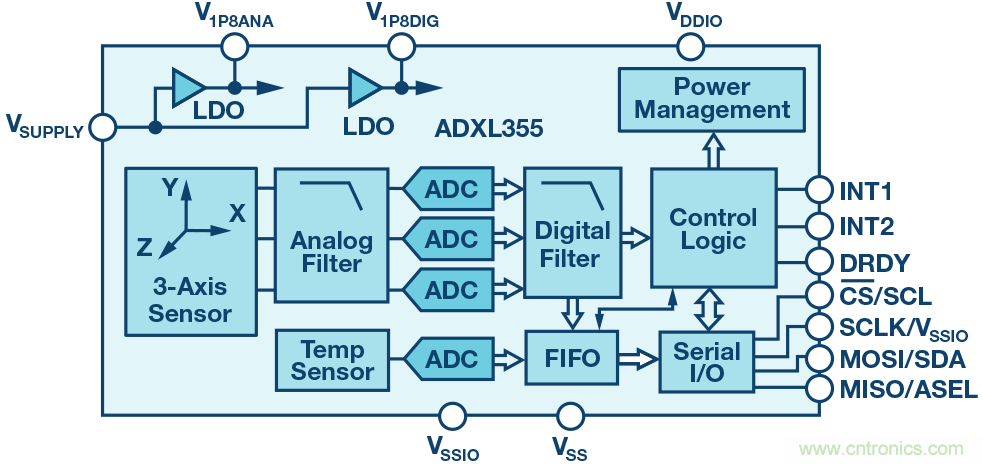
圖3. 低噪聲、低漂移、低功耗3軸MEMS加速度計(jì)ADXL355
下面比較通用加速度計(jì)ADXL345和新一代低噪聲、低漂移、低功耗加速度計(jì)ADXL355,后者是廣泛應(yīng)用的理想之選,例如物聯(lián)網(wǎng)傳感器節(jié)點(diǎn)和傾角計(jì)。這一比較著眼于傾斜應(yīng)用中的誤差源,以及可以補(bǔ)償或消除的誤差。表2列出了消費(fèi)級(jí)ADXL345加速度計(jì)理想性能規(guī)格及相應(yīng)傾斜誤差的估算值。試圖達(dá)到最佳傾斜精度時(shí),必須采用某種形式的溫度穩(wěn)定或補(bǔ)償。在下面的例子中,假設(shè)恒溫為25°C。無(wú)法完全補(bǔ)償?shù)淖钪饕`差促成因素是溫漂失調(diào)、偏置漂移和噪聲??梢越档蛶拋?lái)降低噪聲,因?yàn)閮A斜應(yīng)用通常需要低于1 kHz的帶寬。

表2. ADXL345誤差源估算值
表3列出了適用于ADXL355的相同標(biāo)準(zhǔn)。短期偏置值根據(jù)ADXL355數(shù)據(jù)手冊(cè)中的Allan方差圖估算。25°C時(shí),通用ADXL345補(bǔ)償后的估計(jì)傾斜精度為0.1°。工業(yè)級(jí)ADXL355的估計(jì)傾斜精度為0.005°。通過(guò)比較ADXL345和ADXL355可以看出,重大誤差貢獻(xiàn)因素引起的誤差已顯著降低,比如噪聲引起的誤差從0.05°降低到0.0045°,偏置漂移引起的誤差從0.057°降低到0.00057°。這表明MEMS電容式加速度計(jì)在噪聲和偏置漂移等性能方面取得了巨大飛躍,在動(dòng)態(tài)條件下能夠提供更高水平的傾斜精度。

表3. ADXL355誤差源估算值
選擇更高等級(jí)的加速度計(jì)對(duì)于實(shí)現(xiàn)所需性能至關(guān)重要,特別是應(yīng)用需要小于1°的傾斜精度時(shí)。應(yīng)用精度取決于應(yīng)用條件(溫度大幅波動(dòng),振動(dòng))和傳感器選擇(消費(fèi)級(jí)與工業(yè)級(jí)或戰(zhàn)術(shù)級(jí))。在這種情況下,ADXL345將需要大量的補(bǔ)償和校準(zhǔn)工作才能實(shí)現(xiàn)小于1°的傾斜精度,增加整個(gè)系統(tǒng)的工作量和成本。根據(jù)最終環(huán)境和溫度范圍內(nèi)的振動(dòng)大小,甚至不可能實(shí)現(xiàn)上述精度。25°C至85°C范圍內(nèi)的溫度系數(shù)失調(diào)漂移為1.375°,已經(jīng)超過(guò)傾斜精度小于1°的要求。
25°C到85°C范圍內(nèi)ADXL355的最大溫度系數(shù)失調(diào)漂移為0.5°。
ADXL354和ADXL355可重復(fù)性(X和Y軸為±3.5 mg/0.2°,Z軸為±9 mg/0.5°)為10年壽命預(yù)測(cè)值,包括高溫工作壽命測(cè)試(HTOL)(TA = 150°C、VSUPPLY = 3.6 V、1000小時(shí))、溫度循環(huán)(−55°C至+125°C且循環(huán)1000次)、速度隨機(jī)游走、寬帶噪聲和溫度遲滯引起的偏移。這些新型加速度計(jì)可在所有條件下提供可重復(fù)的傾斜測(cè)量,在惡劣環(huán)境中無(wú)需進(jìn)行大量校準(zhǔn)即可實(shí)現(xiàn)最小傾斜誤差,而且能最大程度減少部署后的校準(zhǔn)需要。ADXL354和ADXL355加速度計(jì)能以0.15 mg/°C(最大值)的零失調(diào)系數(shù)保證溫度穩(wěn)定性。這種穩(wěn)定性最大程度地減少了校準(zhǔn)和測(cè)試相關(guān)的資源和成本開(kāi)銷(xiāo),幫助設(shè)備OEM制造商實(shí)現(xiàn)更高的吞吐速率。此外,產(chǎn)品采用密封封裝,可以確保最終產(chǎn)品出廠(chǎng)后重復(fù)性與穩(wěn)定性始終符合其規(guī)格參數(shù)。
通常,數(shù)據(jù)手冊(cè)上不會(huì)顯示可重復(fù)性和對(duì)振動(dòng)校正誤差(VRE)的抑制能力,因?yàn)檫@些參數(shù)可能暴露產(chǎn)品性能較低。例如,ADXL345是一款針對(duì)消費(fèi)類(lèi)應(yīng)用的通用加速度計(jì),VRE不是設(shè)計(jì)人員的重要關(guān)注參數(shù)。然而,在慣性導(dǎo)航等高要求應(yīng)用、傾斜應(yīng)用或振動(dòng)頻繁的特定環(huán)境中,對(duì)VRE的抑制能力可能是設(shè)計(jì)人員的重點(diǎn)關(guān)注對(duì)象,因此ADXL354/ADXL355和ADXL356/ADXL357 數(shù)據(jù)手冊(cè)會(huì) 給出此類(lèi)參數(shù)。
如表4所示,VRE是加速度計(jì)暴露于寬帶振動(dòng)時(shí)引入的失調(diào)誤差。當(dāng)加速度計(jì)暴露于振動(dòng)環(huán)境時(shí),相比溫漂和噪聲導(dǎo)致的0 g失調(diào),VRE在傾斜測(cè)量中會(huì)導(dǎo)致明顯誤差。這是不再使用數(shù)據(jù)手冊(cè)的主要原因之一,因?yàn)楹苋菀籽谏w其他主要規(guī)格。
VRE是加速度計(jì)對(duì)交流振動(dòng)(被整流為直流)的響應(yīng)。這些直流整流的振動(dòng)可能會(huì)使加速度計(jì)失調(diào)發(fā)生偏移,引起嚴(yán)重誤差,尤其是在目標(biāo)信號(hào)為直流輸出的傾斜應(yīng)用中。直流失調(diào)的任何小變化都可能被解釋為傾角變化,導(dǎo)致系統(tǒng)級(jí)誤差。
表4. 以?xún)A斜度表示的誤差
1 2.5g rms振動(dòng)引起的1g方位失調(diào)的范圍為±2g。
各種諧振和加速度計(jì)(本例為ADXL355)中的濾波器均可能引起VRE,因?yàn)閂RE對(duì)頻率有很強(qiáng)的依賴(lài)性。這些諧振會(huì)放大振動(dòng),放大倍數(shù)等于諧振的Q因數(shù),而在較高頻率時(shí)會(huì)抑制振動(dòng),原因是諧振器存在二階偶極子響應(yīng)。傳感器的諧振品質(zhì)因數(shù)越高,振動(dòng)幅度越大,其VRE也就越大。較大測(cè)量帶寬會(huì)將高頻帶內(nèi)振動(dòng)包含在內(nèi),引起較高的VRE,如圖4所示。為加速度計(jì)選擇合適的帶寬以抑制高頻振動(dòng),可以避免很多振動(dòng)相關(guān)問(wèn)題。1
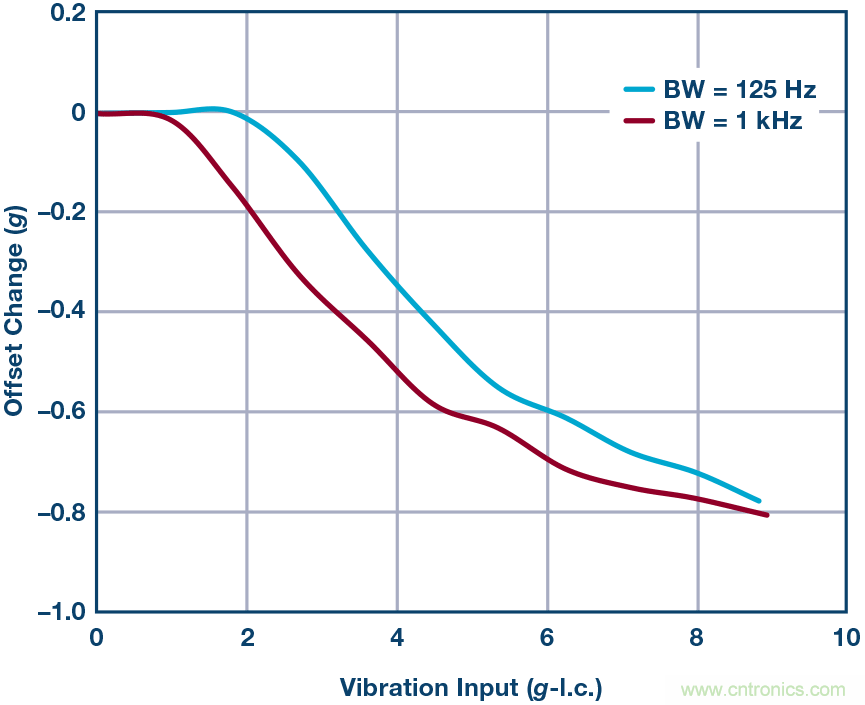
圖4. 在不同帶寬進(jìn)行的ADXL355 VRE測(cè)試
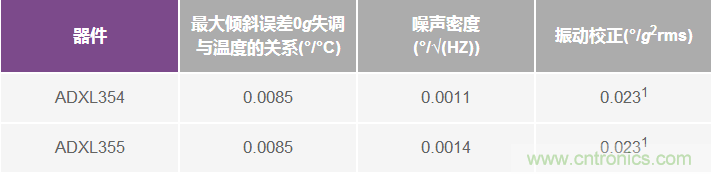
靜態(tài)傾斜測(cè)量通常需要±1g到±2g的低g加速度計(jì),帶寬小于1.5 kHz。模擬輸出ADXL354和數(shù)字輸出ADXL355均為低噪聲密度(分別為20 μg√Hz和25 μg√Hz)、低0g失調(diào)漂移、低功耗三軸加速度計(jì),集成溫度傳感器,測(cè)量范圍可選,如表5所示。
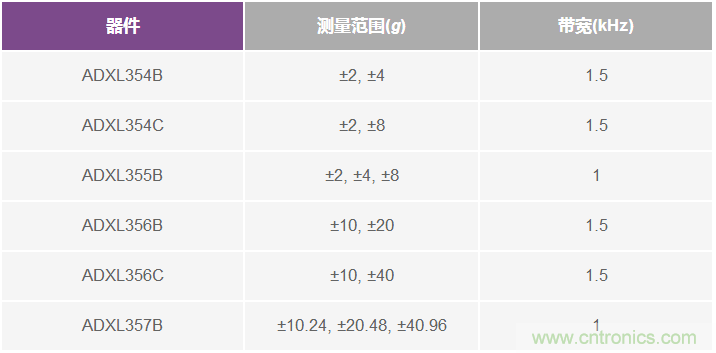
表5. ADXL354/ADXL355/ADXL356/ADXL357測(cè)量范圍
ADXL354/ADXL355和ADXL356/ADXL357采用密封封裝,有助于實(shí)現(xiàn)出色的長(zhǎng)期穩(wěn)定性。性能提升與封裝通常是正相關(guān),如圖5所示。封裝常常被忽視,其實(shí)制造商可以利用封裝來(lái)實(shí)現(xiàn)更好的穩(wěn)定和漂移性能。這是ADI公司的一個(gè)重點(diǎn)關(guān)注方面,我們提供類(lèi)型廣泛的傳感器封裝以適應(yīng)不同的應(yīng)用領(lǐng)域。
高溫和動(dòng)態(tài)環(huán)境
在適合高溫或惡劣環(huán)境的加速度計(jì)可用之前,一些設(shè)計(jì)人員曾不得不將標(biāo)準(zhǔn)溫度IC用在遠(yuǎn)超出數(shù)據(jù)手冊(cè)限值的情形中。這意味著最終用戶(hù)須承擔(dān)在高溫下檢驗(yàn)器件質(zhì)量的責(zé)任和風(fēng)險(xiǎn),成本高昂且頗費(fèi)時(shí)間。密封封裝能夠耐受高溫已是廣為人知的事實(shí),它通過(guò)一道能抵御濕氣和污染的屏障來(lái)防止腐蝕。ADI公司提供各類(lèi)密封器件,這些器件具有增強(qiáng)的溫度穩(wěn)定性和性能。ADI公司還大力研究了塑料封裝在高溫下的性能,尤其是引線(xiàn)框架和引腳適應(yīng)高溫焊接工藝的能力,使其在高沖擊和振動(dòng)環(huán)境中牢固可靠。因此,ADI公司提供18款額定溫度范圍為−40°C至+125°C的加速度計(jì),包括 ADXL206, ADXL354/ADXL355/ADXL356/ADXL357, ADXL1001/ADXL1002, ADIS16227/ADIS16228和ADIS16209。大部分競(jìng)爭(zhēng)對(duì)手未提 供能在−40°C至+125°C溫度范圍內(nèi)或惡劣環(huán)境條件下(例如重工業(yè)機(jī)械和井下鉆探)工作的MEMS電容式加速度計(jì)。
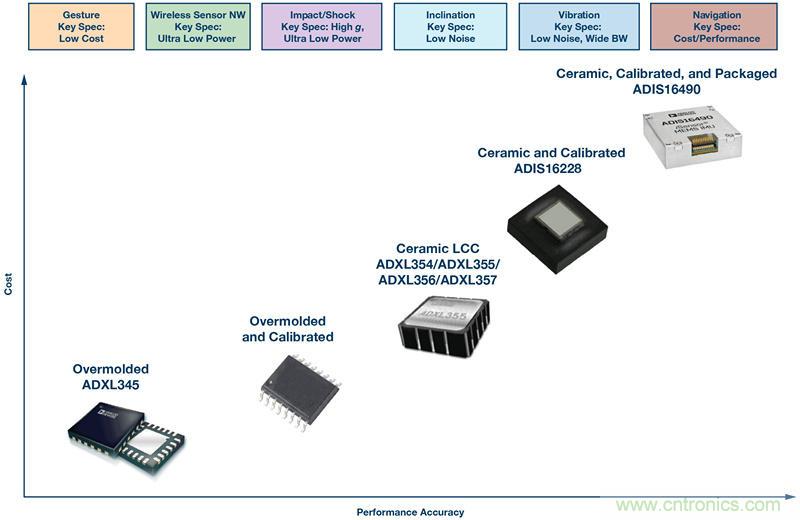
圖5. 高級(jí)封裝技術(shù)和校準(zhǔn)帶來(lái)性能提升的示例
在溫度超過(guò)125°C的惡劣環(huán)境中進(jìn)行傾斜測(cè)量是極具挑戰(zhàn)性的工作。ADXL206是一款高精度(傾斜精度<0.06°)、低功耗、完整的雙軸MEMS加速度計(jì),適用于高溫和惡劣環(huán)境,例如井下鉆探。該器件采用13 mm × 8 mm × 2 mm側(cè)面釬焊、陶瓷、雙列直插式封裝,支持−40°C至+175°C的環(huán)境溫度范圍,超過(guò)175°C時(shí)性能會(huì)下降,但100%可恢復(fù)。
在有振動(dòng)的動(dòng)態(tài)環(huán)境中(例如農(nóng)用設(shè)備或無(wú)人機(jī))進(jìn)行傾斜測(cè)量,需要g值范圍較高的加速度計(jì),比如ADXL356/ADXL357。有限g值范圍的加速度計(jì)測(cè)量可能會(huì)削波,導(dǎo)致輸出失調(diào)增加。引起削波的原因可能是靈敏軸在1 g重力場(chǎng)中,或者是發(fā)生上升時(shí)間快但衰減慢的沖擊。較高的g值范圍可減少加速度計(jì)削波,從而降低失調(diào),在動(dòng)態(tài)應(yīng)用中提供更好的傾斜精度。
圖6所示為ADXL356 Z軸的g值范圍有限的測(cè)量,此測(cè)量范圍中已經(jīng)存在1g。圖7所示為同一測(cè)量,但g值范圍從±10 g擴(kuò)展到±40g??梢郧宄吹剑铀俣扔?jì)的g值范圍擴(kuò)展顯著降低了削波引起的失調(diào)。
ADXL354/ADXL355和ADXL356/ADXL357提供出色的振動(dòng)校正、長(zhǎng)期重復(fù)性和低噪聲性能,而且尺寸很小,非常適合靜態(tài)和動(dòng)態(tài)環(huán)境中的傾斜檢測(cè)應(yīng)用。
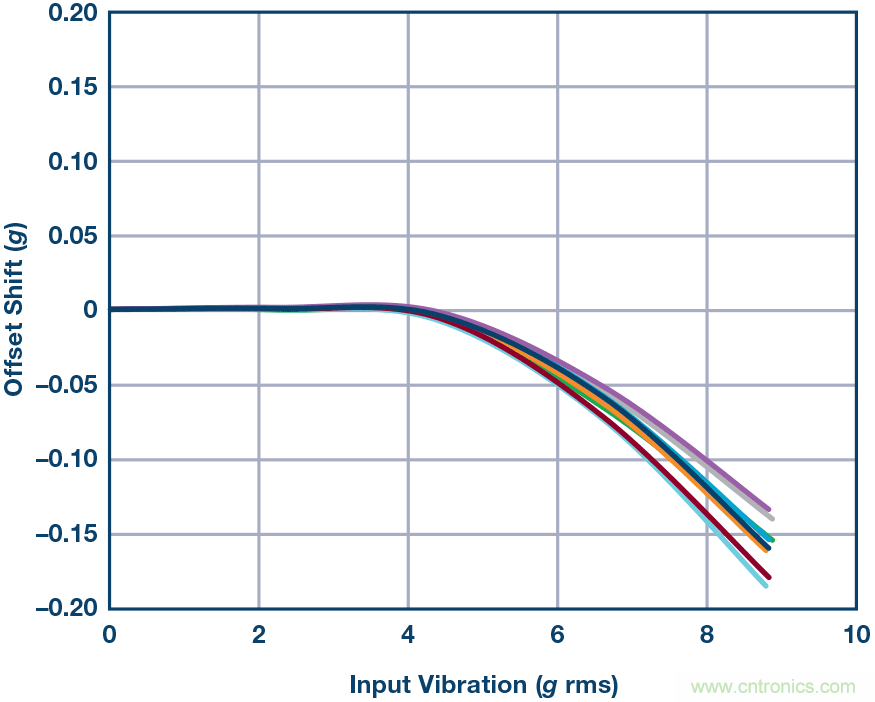
圖6. ADXL356 VRE,Z軸相對(duì)于1 g的失調(diào),±10 g范圍,Z軸方向 = 1 g
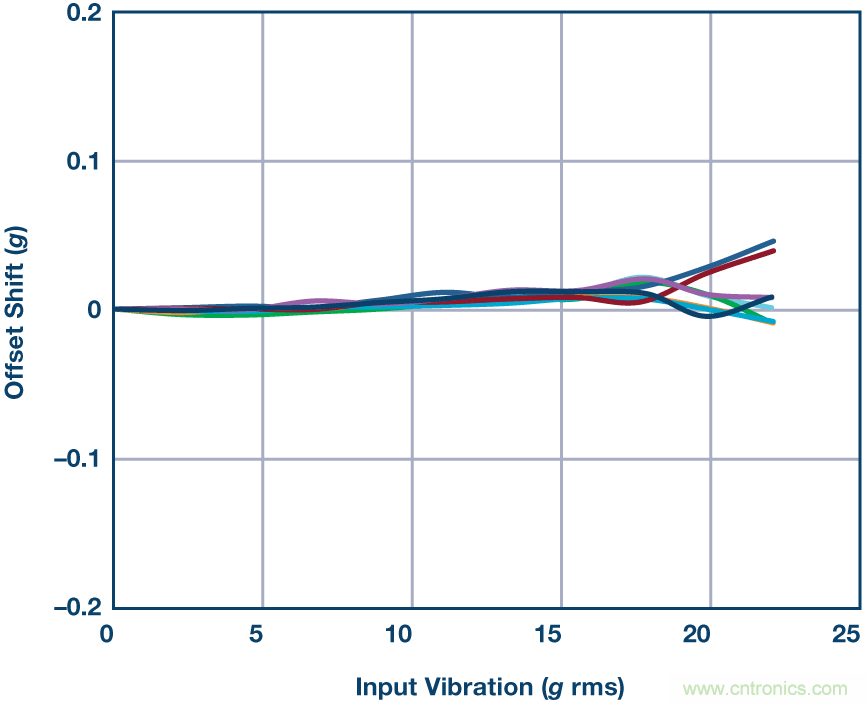
圖7. ADXL356 VRE,Z軸相對(duì)于1 g的失調(diào),±40 g范圍,Z軸方向 = 1 g
穩(wěn)定
主要標(biāo)準(zhǔn):噪聲密度、速度隨機(jī)游走、運(yùn)動(dòng)中偏置穩(wěn)定度、偏置重復(fù)性和帶寬。
檢測(cè)并了解運(yùn)動(dòng)可以給許多應(yīng)用帶來(lái)好處。掌控一個(gè)系統(tǒng)發(fā)生的運(yùn)動(dòng),然后利用該信息提高性能(縮短響應(yīng)時(shí)間、提高精度、加快運(yùn)行速度),增強(qiáng)安全性或可靠性(系統(tǒng)在危險(xiǎn)情況下關(guān)機(jī)),或者獲得其他增值特性,是很有益的。由于運(yùn)動(dòng)的復(fù)雜性,有大量穩(wěn)定性應(yīng)用需要綜合運(yùn)用陀螺儀和加速度計(jì)(傳感器融合,如圖8所示),例如UAV監(jiān)控設(shè)備和船上天線(xiàn)指向系統(tǒng)等。2
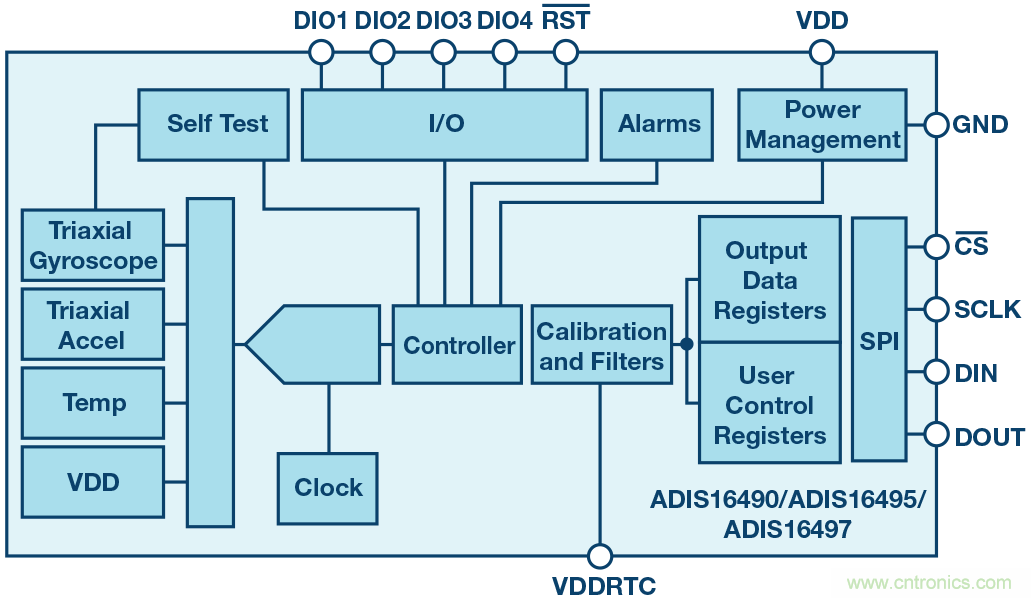
圖8. 6自由度IMU
6自由度IMU使用多個(gè)傳感器,以便彌補(bǔ)彼此的弱點(diǎn)??雌饋?lái)像是一個(gè)或兩個(gè)軸上的簡(jiǎn)單慣性運(yùn)動(dòng),實(shí)際可能需要加速度計(jì)和陀螺儀傳感器融合,目的是消除振動(dòng)、重力和其他單憑加速度計(jì)或陀螺儀無(wú)法準(zhǔn)確測(cè)量的影響因素。加速度計(jì)數(shù)據(jù)包括重力分量和運(yùn)動(dòng)加速度。二者無(wú)法區(qū)分,但可利用陀螺儀將重力分量從加速度計(jì)輸出中去除。為了根據(jù)加速度確定位置,需要進(jìn)行積分,在此過(guò)程之后,加速度計(jì)數(shù)據(jù)的重力分量引起的誤差可能會(huì)快速變大。由于累積誤差,僅憑陀螺儀不足以確定位置。陀螺儀不檢測(cè)重力,因此可用作加速度計(jì)的輔助傳感器。
在穩(wěn)定性應(yīng)用中,MEMS傳感器必須精確測(cè)量平臺(tái)方位,特別是在運(yùn)動(dòng)時(shí)。圖9是一個(gè)采用伺服電機(jī)校正角向運(yùn)動(dòng)的典型平臺(tái)穩(wěn)定系統(tǒng)的框圖。反饋/伺服電機(jī)控制器將方向傳感器數(shù)據(jù)轉(zhuǎn)換為伺服電機(jī)的校正控制信號(hào)。
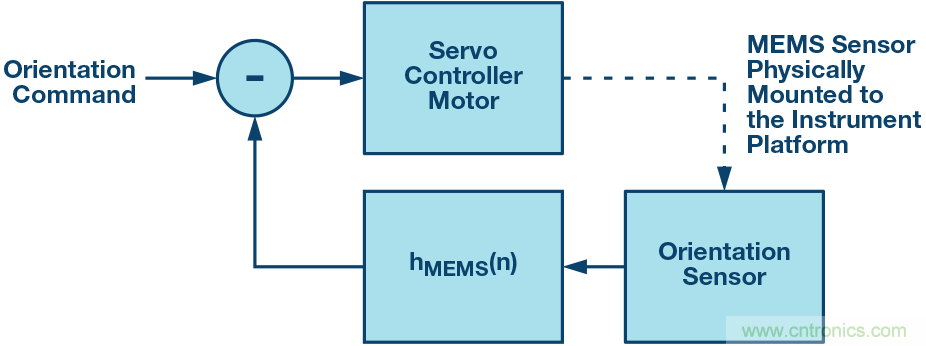
圖9. 基本平臺(tái)穩(wěn)定系統(tǒng)3
最終應(yīng)用將決定所需的精度水平,而所選的傳感器質(zhì)量(消費(fèi)級(jí)還是工業(yè)級(jí))將決定其能否實(shí)現(xiàn)。區(qū)分消費(fèi)級(jí)器件和工業(yè)級(jí)器件很重要,有時(shí)候二者的區(qū)別很微妙,可能需要仔細(xì)考慮。表6顯示了消費(fèi)級(jí)加速度計(jì)和IMU中集成的中檔工業(yè)級(jí)加速度計(jì)的主要區(qū)別。

表6. 工業(yè)MEMS器件對(duì)所有已知潛在誤差源進(jìn)行全面測(cè)定,精度水平比消費(fèi)級(jí)器件高出一個(gè)數(shù)量級(jí)以上2
在某些條件有利且可接受較低精度數(shù)據(jù)的情況下,使用低精度器件便可滿(mǎn)足性能需要。然而,對(duì)能在動(dòng)態(tài)環(huán)境中工作的傳感器需求迅速增長(zhǎng),較低精度器件由于不能降低實(shí)際測(cè)量中的振動(dòng)效應(yīng)或溫度效應(yīng)而大受影響,很難達(dá)到小于3°至5°的指向精度。多數(shù)低端消費(fèi)級(jí)器件未提供諸如振動(dòng)校正、角度隨機(jī)游走之類(lèi)的參數(shù)規(guī)格,而這些規(guī)格在工業(yè)應(yīng)用中恰恰可能是最大的誤差源。
為了在動(dòng)態(tài)環(huán)境中達(dá)到1°甚至0.1°的指向精度,設(shè)計(jì)人員的器件選擇必須聚焦于傳感器抑制溫漂誤差和振動(dòng)影響的能力。傳感器濾波和算法(傳感器融合)雖然是提升性能的關(guān)鍵要素,但無(wú)法消除消費(fèi)級(jí)與工業(yè)級(jí)傳感器的差距。ADI公司新型工業(yè)IMU的性能接近于上一代導(dǎo)彈制導(dǎo)系統(tǒng)所用的產(chǎn)品。諸如ADIS1646x和已宣布的ADIS1647x等器件以標(biāo)準(zhǔn)和迷你IMU外形尺寸提供精密運(yùn)動(dòng)檢測(cè),打進(jìn)過(guò)去的特殊應(yīng)用領(lǐng)域。
本文第二部分將繼續(xù)探討MEMS加速度計(jì)的重要工作特性,以及它們與可穿戴設(shè)備、狀態(tài)監(jiān)控、物聯(lián)網(wǎng)、結(jié)構(gòu)健康監(jiān)控和資產(chǎn)健康監(jiān)控等應(yīng)用領(lǐng)域的關(guān)系。
參考電路
1. Long Pham and Anthony DeSimone. “MEMS加速度計(jì)的振動(dòng)校正” ADI公司,2017年。
2. Bob Scannell. “高性能慣性傳感器助力運(yùn)動(dòng)物聯(lián)網(wǎng)” ADI公司,2017年。
3. Mark Looney. “分析穩(wěn)定系統(tǒng)中的慣性MEMS的頻率響應(yīng)” 《模擬對(duì)話(huà)》,第46卷,2012年。
推薦閱讀:




