

【導(dǎo)讀】隨著電子技術(shù)的發(fā)展,汽車(chē)電子化程度不斷提高,通常的機(jī)械系統(tǒng)已經(jīng)難以解決某些與汽車(chē)功能要求有關(guān)的問(wèn)題,而被電子控制系統(tǒng)代替。
前言
隨著電子技術(shù)的發(fā)展,汽車(chē)電子化程度不斷提高,通常的機(jī)械系統(tǒng)已經(jīng)難以解決某些與汽車(chē)功能要求有關(guān)的問(wèn)題,而被電子控制系統(tǒng)代替。

汽車(chē)傳感器
傳感器作為汽車(chē)電控系統(tǒng)的關(guān)鍵部件,它直接影響汽車(chē)的技術(shù)性能的發(fā)揮?,F(xiàn)代汽車(chē)已將傳感器技術(shù)擴(kuò)展到底盤(pán)、車(chē)身和燈光電氣系統(tǒng)上了。這些系統(tǒng)采用的傳感器有100多種。這些傳感器主要分布在發(fā)動(dòng)機(jī)控制系統(tǒng)、底盤(pán)控制系統(tǒng)和車(chē)身控制系統(tǒng)中。
傳感器的作用就是根據(jù)規(guī)定的被測(cè)量的大小,定量提供有用的電輸出信號(hào)的部件,亦即傳感器把光、時(shí)間、電、溫度、壓力及氣體等的物理、化學(xué)量轉(zhuǎn)換成信號(hào)的變換器。
汽車(chē)傳感器的種類(lèi)
汽車(chē)傳感器的種類(lèi)這么多,常見(jiàn)的有哪些呢?下面來(lái)介紹分布在不同車(chē)輛控制系統(tǒng)中的一些常用的汽車(chē)傳感器。
發(fā)動(dòng)機(jī)控制用傳感器
發(fā)動(dòng)機(jī)控制用傳感器有許多種,其中包括溫度傳感器、壓力傳感器、轉(zhuǎn)速和角度傳感器、流量傳感器、位置傳感器、氣體濃度傳感器、爆震傳感器等。這類(lèi)傳感器是整 個(gè)發(fā)動(dòng)機(jī)的核心,利用它們可提高發(fā)動(dòng)機(jī)動(dòng)力性、降低油耗、減少?gòu)U氣、反映故障等。

由于發(fā)動(dòng)機(jī)用傳感器工作在發(fā)動(dòng)機(jī)振動(dòng)、汽油蒸氣、污泥和泥水等惡劣環(huán)境中,因此它們耐惡劣環(huán)境技術(shù)指標(biāo)要高于一般的傳感器。對(duì)于它們的性能指標(biāo)要求有很多種,其中最關(guān)鍵的是測(cè)量精度與可靠性,否則由傳感器檢測(cè)帶來(lái)的誤差最終將導(dǎo)致發(fā)動(dòng)機(jī)控制系統(tǒng)失靈或故障。
1.溫度傳感器
溫度傳感器主要用于檢測(cè)發(fā)動(dòng)機(jī)溫度、吸入氣體溫度、冷卻水溫度、燃油溫度以及催化溫度等。溫度用傳感器有線(xiàn)繞電阻式、熱敏電阻式和熱偶電阻式三種主要類(lèi)型。三種類(lèi)型傳感器各有特點(diǎn),其應(yīng)用場(chǎng)合也略有區(qū)別。
線(xiàn)繞電阻式溫度傳感器的精度高,但響應(yīng)特性差;
熱敏電阻式溫度傳感器靈敏度高,響應(yīng)特性較好,但線(xiàn)性差,適應(yīng)溫度較低;
熱偶電阻式溫度傳感器的精度高,測(cè)量溫度范圍寬,但需要配合放大器和冷端處理一起使用。
已實(shí)用化的產(chǎn)品有熱敏電阻式溫度傳感器(通用型-50℃~130℃,精度1.5%,響應(yīng)時(shí)間10ms;高溫型600℃~1000℃,精度5%,響應(yīng)時(shí)間10ms)、鐵氧體式溫度傳感器(ON/OFF型,-40℃~120℃,精度2.0%)、金屬或半導(dǎo)體膜空氣溫度傳感器(-40℃~150℃,精度2.0%、5%,響應(yīng)時(shí)間20ms)等。
2.壓力傳感器
壓力傳感器主要用于檢測(cè)氣缸負(fù)壓、大氣壓、渦輪發(fā)動(dòng)機(jī)的升壓比、氣缸內(nèi)壓、油壓等。吸氣負(fù)壓式傳感器主要用于吸氣壓、負(fù)壓、油壓檢測(cè)。汽車(chē)用壓力傳感器應(yīng)用較多的有電容式、壓阻式、差動(dòng)變壓器式(LVDT)、表面彈性波式(SAW)。
電容式壓力傳感器主要用于檢測(cè)負(fù)壓、液壓、氣壓,測(cè)量范圍20~100kPa,具有輸入能量高,動(dòng)態(tài)響應(yīng)特性好、環(huán)境適應(yīng)性好等特點(diǎn);
壓阻式壓力傳感器受溫度影響較大,需要另設(shè)溫度補(bǔ)償電路,但適應(yīng)于大量生產(chǎn);
LVDT式壓力傳感器有較大的輸出,易于數(shù)字輸出,但抗干擾性差;
SAW式壓力傳感器具有體積小、質(zhì)量輕、功耗低、可靠性高、靈敏度高、分辨率高、數(shù)字輸出等特點(diǎn),用于汽車(chē)吸氣閥壓力檢測(cè),能在高溫下穩(wěn)定地工作,是一種較為理想的傳感器。
3.流量傳感器
流量傳感器主要用于發(fā)動(dòng)機(jī)空氣流量和燃料流量的測(cè)量。空氣流量的測(cè)量用于發(fā)動(dòng)機(jī)控制系統(tǒng)確定燃燒條件、控制空燃比、起動(dòng)、點(diǎn)火等。空氣流量傳感器有旋轉(zhuǎn)翼片式(葉片式)、卡門(mén)渦旋式、熱線(xiàn)式、熱膜式等四種類(lèi)型。
旋轉(zhuǎn)翼片式(葉片式)空氣流量計(jì)結(jié)構(gòu)簡(jiǎn)單,測(cè)量精度較低,測(cè)得的空氣流量需要進(jìn)行溫度補(bǔ)償;
卡門(mén)渦旋式空氣流量計(jì)無(wú)可動(dòng)部件,反映靈敏,精度較高,也需要進(jìn)行溫度補(bǔ)償;
熱線(xiàn)式空氣流量計(jì)測(cè)量精度高,無(wú)需溫度補(bǔ)償,但易受氣體脈動(dòng)的影響,易斷絲;
熱膜式空氣流量計(jì)和熱線(xiàn)式空氣流量計(jì)測(cè)量原理一樣,但體積少,適合大批量生產(chǎn),成本低。
空氣流量傳感器的主要技術(shù)指標(biāo)為:工作范圍0.11~103立方米/min,工作溫度-40℃~120℃,精度≤1%。
燃料流量傳感器用于檢測(cè)燃料流量,主要有水輪式和循環(huán)球式,其動(dòng)態(tài)范圍0~60kg/h,工作溫度-40℃~120℃,精度±1%,響應(yīng)時(shí)間小于10ms。
4.位置和轉(zhuǎn)速傳感器
位置和轉(zhuǎn)速傳感器主要用于檢測(cè)曲軸轉(zhuǎn)角、發(fā)動(dòng)機(jī)轉(zhuǎn)速、節(jié)氣門(mén)的開(kāi)度、車(chē)速等。目前汽車(chē)使用的位置和轉(zhuǎn)速傳感器主要有交流發(fā)電機(jī)式、磁阻式、霍爾效應(yīng)式、簧片開(kāi)關(guān)式、光學(xué)式、半導(dǎo)體磁性晶體管式等,其測(cè)量范圍0°~360°,精度±0.5°以下,測(cè)彎曲角達(dá)±0.1 。
車(chē)速傳感器種類(lèi)繁多,有敏感車(chē)輪旋轉(zhuǎn)的、也有敏感動(dòng)力傳動(dòng)軸轉(zhuǎn)動(dòng)的,還有敏感差速?gòu)膭?dòng)軸轉(zhuǎn)動(dòng)的。當(dāng)車(chē)速高于100km/h時(shí),一般測(cè)量方法誤差較大,需采用非接觸式光電速度傳感器,測(cè)速范圍0.5~250km/h,重復(fù)精度0.1%,距離測(cè)量誤差優(yōu)于0.3%。
5.氣體濃度傳感器
氣體濃度傳感器主要用于檢測(cè)車(chē)體內(nèi)氣體和廢氣排放。其中,最主要的是氧傳感器,實(shí)用化的有氧化鋯傳感器(使用溫度-40℃~900℃,精度1%)、氧化鋯濃差電池型氣體傳感器(使用溫度300℃~800℃)、固體電解質(zhì)式氧化鋯氣體傳感器(使用溫度0℃~400℃,精度0.5%)。
另外還有二氧化鈦氧傳感器。和氧化鋯傳感器相比,二氧化鈦氧傳感器具有結(jié)構(gòu)簡(jiǎn)單、輕巧、便宜,且抗鉛污染能力強(qiáng)的特點(diǎn)。
6.爆震傳感器
爆震傳感器用于檢測(cè)發(fā)動(dòng)機(jī)的振動(dòng),通過(guò)調(diào)整點(diǎn)火提前角控制和避免發(fā)動(dòng)機(jī)發(fā)生爆震。可以通過(guò)檢測(cè)氣缸壓力、發(fā)動(dòng)機(jī)機(jī)體振動(dòng)和燃燒噪聲等三種方法來(lái)檢測(cè)爆震。
爆震傳感器有磁致伸縮式和壓電式。磁致伸縮式爆震傳感器的使用溫度為-40℃~125℃,頻率范圍為5~10kHz;壓電式爆震傳感器在中心頻率5.417kHz處,其靈敏度可達(dá)200mV/g,在振幅為0.1g~10g范圍內(nèi)具有良好線(xiàn)性度。
底盤(pán)控制用傳感器
底盤(pán)控制用傳感器是指分布在變速器控制系統(tǒng)、懸架控制系統(tǒng)、動(dòng)力轉(zhuǎn)向系統(tǒng)、防抱制動(dòng)系統(tǒng)中的傳感器,在不同系統(tǒng)中作用不同,但工作原理與發(fā)動(dòng)機(jī)中傳感器是相同的,主要有以下幾種形式傳感器:
1.變速器控制傳感器
多用于電控自動(dòng)變速器的控制。它是根據(jù)車(chē)速傳感器、加速度傳感器、發(fā)動(dòng)機(jī)負(fù)荷傳感器、發(fā)動(dòng)機(jī)轉(zhuǎn)速傳感器、水溫傳感器、油溫傳感器檢測(cè)所獲得的信息經(jīng)處理使電控裝置控制換檔點(diǎn)和液力變矩器鎖止,實(shí)現(xiàn)最大動(dòng)力和最大燃油經(jīng)濟(jì)性。
2.懸架系統(tǒng)控制傳感器
主要有車(chē)速傳感器、節(jié)氣門(mén)開(kāi)度傳感器、加速度傳感器、車(chē)身高度傳感器、轉(zhuǎn)向盤(pán)轉(zhuǎn)角傳感器等。根據(jù)檢測(cè)到的信息自動(dòng)調(diào)整車(chē)高,抑制車(chē)輛姿勢(shì)的變化等,實(shí)現(xiàn)對(duì)車(chē)輛舒適性、操縱穩(wěn)定性和行車(chē)穩(wěn)定性的控制。
3.動(dòng)力轉(zhuǎn)向系統(tǒng)傳感器
它是根據(jù)車(chē)速傳感器、發(fā)動(dòng)機(jī)轉(zhuǎn)速傳感器、轉(zhuǎn)矩傳感器等使動(dòng)力轉(zhuǎn)向電控系統(tǒng)實(shí)現(xiàn)轉(zhuǎn)向操縱輕便,提高響應(yīng)特性,減少發(fā)動(dòng)機(jī)損耗,增大輸出功率,節(jié)省燃油等。
4.防抱制動(dòng)傳感器
它是根據(jù)車(chē)輪角速度傳感器,檢測(cè)車(chē)輪轉(zhuǎn)速,在各車(chē)輪的滑移率為20%時(shí),控制制動(dòng)油壓、改善制動(dòng)性能,確保車(chē)輛的操縱性和穩(wěn)定性。
車(chē)身控制用傳感器
采用這類(lèi)傳感器的主要目的是提高汽車(chē)安全性、可靠性、舒適性等。
應(yīng)用于自動(dòng)空調(diào)系統(tǒng)中的多種溫度傳感器、風(fēng)量傳感器、日照傳感器等;
安全氣囊系統(tǒng)中加速度傳感器;亮度自控中光傳感器;
用于門(mén)鎖控制中的車(chē)速傳感器;
用于亮度自動(dòng)控制中的光傳感器;
用于倒車(chē)控制中的超聲波傳感器或激光傳感器;
用于保持車(chē)距的距離感器;
用于消除駕駛員盲區(qū)的圖象傳感器等。
死角報(bào)警系統(tǒng)中超聲波傳感器;圖像傳感器等。
導(dǎo)航系統(tǒng)用傳感器
隨著基于GPS/GIS(全球定位系統(tǒng)和地理信息系統(tǒng))的導(dǎo)航系統(tǒng)在汽車(chē)上的應(yīng)用,導(dǎo)航用傳感器這幾年得到迅速發(fā)展。導(dǎo)航系統(tǒng)用傳感器主要有:確定汽車(chē)行駛方向的羅盤(pán)傳感器、陀螺儀和車(chē)速傳感器、方向盤(pán)轉(zhuǎn)角傳感器等。
無(wú)人駕駛技術(shù)的汽車(chē)傳感器
無(wú)人駕駛技術(shù)現(xiàn)如今其實(shí)非常成熟了,汽車(chē)如何能對(duì)現(xiàn)實(shí)中復(fù)雜的交通狀況了如指掌,如何可以像人的眼睛和大腦一樣靈活應(yīng)變。關(guān)鍵就在需要各種各樣的傳感器合作來(lái)解決,它們最終將監(jiān)測(cè)到的數(shù)據(jù)傳給高精密的處理器,識(shí)別道路、標(biāo)示和行人,做出加速、轉(zhuǎn)向、制動(dòng)等決策。
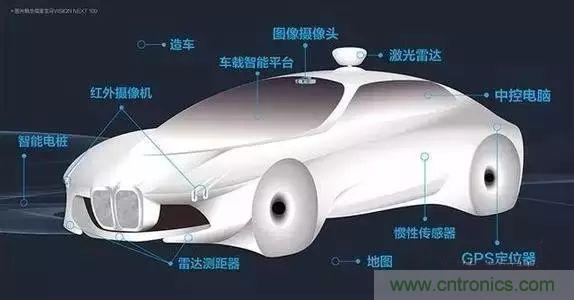
在智能感知識(shí)別的部分,車(chē)載光學(xué)系統(tǒng)和車(chē)載雷達(dá)系統(tǒng)是保證行車(chē)安全最為重要的系統(tǒng),目前,主流的用于周?chē)h(huán)境感測(cè)的傳感器有激光雷達(dá)(LiDAR)、毫米波雷達(dá)(millimeter wave)、視覺(jué)傳感器三種。
激光雷達(dá)(LiDAR)
通過(guò)掃描從一個(gè)物體上反射回來(lái)的激光來(lái)確定物體的距離,可以形成精度高達(dá)厘米級(jí)的3D環(huán)境地圖,因此它在ADAS(先進(jìn)駕駛輔助系統(tǒng))及無(wú)人駕駛系統(tǒng)中起重要作用。從當(dāng)前車(chē)載激光雷達(dá)來(lái)看,機(jī)械式的多線(xiàn)束激光雷達(dá)是主流方案,但受制于價(jià)格高昂的因素尚未普及開(kāi)來(lái)。
在百度無(wú)人駕駛汽車(chē)車(chē)身上,除了部署了毫米波雷達(dá)、視頻等感應(yīng)器,其車(chē)頂就安置了一個(gè)體積較大、價(jià)值70萬(wàn)余人民幣的64位激光雷達(dá),谷歌同樣也是采用的相同高端配置激光雷達(dá)。車(chē)載激光雷達(dá)系統(tǒng)的優(yōu)劣主要取決于2D激光掃描儀的性能。激光發(fā)射器線(xiàn)束的越多,每秒采集的云點(diǎn)就越多。然而線(xiàn)束越多也就代表著激光雷達(dá)的造價(jià)就更加昂貴。激光雷達(dá)除了成本高昂,遇到煙霧介質(zhì)以及雨雪天氣中表現(xiàn)一般,將掣肘它的發(fā)揮。
與雷達(dá)原理相似,激光雷達(dá)使用的技術(shù)是飛行時(shí)間(TOF,Time of Flight)。 具體而言,就是根據(jù)激光遇到障礙物后的折返時(shí)間,計(jì)算目標(biāo)與自己的相對(duì)距離。激光光束可以準(zhǔn)確測(cè)量視場(chǎng)中物體輪廓邊沿與設(shè)備間的相對(duì)距離,這些輪廓信息組成所謂的點(diǎn)云并繪制出3D環(huán)境地圖,精度可達(dá)到厘米級(jí)別,從而提高測(cè)量精度。

激光雷達(dá)作為“機(jī)械之眼”,也大量應(yīng)用在無(wú)人機(jī)、機(jī)器人等等方向上 。相比于攝像頭,激光雷達(dá)的最大優(yōu)勢(shì)在于使用環(huán)境限制較小,即不管在白天或是夜晚都能正常使用。
毫米波雷達(dá)(millimeter wave)
毫米波是指30~300GHz頻域(波長(zhǎng)為1~10mm)的電磁波,毫米波的波長(zhǎng)介于厘米波和光波之間,因此毫米波兼有微波制導(dǎo)和光電制導(dǎo)的優(yōu)點(diǎn)。同厘米波導(dǎo)引頭相比,毫米波導(dǎo)引頭具有體積小、質(zhì)量輕和空間分辨率高的特點(diǎn)。
與紅外、激光、電磁等光學(xué)導(dǎo)引頭相比,毫米波導(dǎo)引頭穿透霧、煙、灰塵的能力強(qiáng),具有全天候(大雨天除外)全天時(shí)的特點(diǎn),這能與激光雷達(dá)的作用產(chǎn)生互補(bǔ)。另外,毫米波導(dǎo)引頭的抗干擾、反隱身能力也優(yōu)于其他微波導(dǎo)引頭 。
缺點(diǎn)是毫米波雷達(dá)由于波長(zhǎng)原因,探測(cè)距離非常有限,也無(wú)法感知行人,而激光雷達(dá)可以對(duì)周邊所有障礙物進(jìn)行精準(zhǔn)的建模。為了克服不同缺點(diǎn),因此勢(shì)必要將這些傳感器組合在一起。
目前看毫米波雷達(dá)也是智能汽車(chē)ADAS 系統(tǒng)的標(biāo)配傳感器,按照目前主流分類(lèi),毫米波雷達(dá)可分為24GHz雷達(dá)和77GHz雷達(dá)。參照其特性,通常車(chē)輛周?chē)能?chē)輛檢測(cè)使用24Ghz,前方車(chē)輛檢測(cè)使用77GHz。
以中國(guó)的實(shí)際國(guó)情以及芯片研發(fā)進(jìn)度等行業(yè)特點(diǎn)來(lái)看,未來(lái)三年內(nèi)24GHz毫米波雷達(dá)在國(guó)內(nèi)仍有市場(chǎng)空間。望眼全球,我國(guó)77GHz毫米波雷達(dá)的大規(guī)模應(yīng)用將稍微推后。
視覺(jué)傳感器
ADAS應(yīng)用攝像頭作為主要傳感器是因?yàn)閿z像頭分辨率高于其他傳感器,可以獲取足夠多的環(huán)境細(xì)節(jié),幫助車(chē)輛進(jìn)行環(huán)境認(rèn)知,車(chē)載攝像頭可以描繪物體的外觀和形狀、讀取標(biāo)志等,這些功能其他傳感器無(wú)法做到。
但是攝像頭受環(huán)境因素以及外部因素影響較大,比如隧道中光線(xiàn)不足,天氣因素導(dǎo)致的視線(xiàn)縮小等。
目前攝像頭的應(yīng)用主要有:?jiǎn)文繑z像頭、后視攝像頭、立體攝像頭或稱(chēng)雙目攝像頭、環(huán)視攝像頭。
當(dāng)然為了提高環(huán)境感知的準(zhǔn)確度,通常需要多種傳感器的組合,最終提供一個(gè)穩(wěn)定耐用的解決方案。
當(dāng)下比較典型的就是毫米波雷達(dá)、激光雷達(dá)和車(chē)載攝像頭,其他的超聲波技術(shù)和紅外線(xiàn)技術(shù)以及這些技術(shù)的算法融合都將讓傳感器產(chǎn)業(yè)帶來(lái)巨大的市場(chǎng)。不過(guò)毋庸置疑,在汽車(chē)實(shí)現(xiàn)完全智能化的這幾年中,傳感器產(chǎn)業(yè)鏈應(yīng)該是最先獲得收益的。
未來(lái)的汽車(chē)傳感器技術(shù)的發(fā)展趨勢(shì)是微型化、多功能化、集成化和智能化。 Mems汽車(chē)傳感器已開(kāi)始逐步取代基于傳統(tǒng)機(jī)電技術(shù)的傳感器,將成為世界汽車(chē)電子的重要構(gòu)成部分。


