

【導(dǎo)讀】無人飛行器安裝的監(jiān)控設(shè)備、海上微波接收機(jī)、車輛安裝的紅外成像系統(tǒng)傳感器以及其他儀器系統(tǒng)都需要具有穩(wěn)定的平臺,以達(dá)到最佳性能,但它們通常在可能遇到振動和其他類型不良運動的應(yīng)用中使用。
振動和正常車輛運動會導(dǎo)致通信中斷、圖像模糊以及其他很多行為,從而降低儀器的性能和執(zhí)行所需功能的能力。平臺穩(wěn)定系統(tǒng)采用閉環(huán)控制系統(tǒng),以主動消除此類運動,從而保證達(dá)到這些儀器的重要性能目標(biāo)。
圖1是平臺穩(wěn)定系統(tǒng)的整體框圖,它使用伺服電機(jī)來校正角向運動。反饋傳感器為儀器平臺提供動態(tài)方位信息。反饋控制器處理這些信息,并將其轉(zhuǎn)換為伺服電機(jī)的校正控制信號。
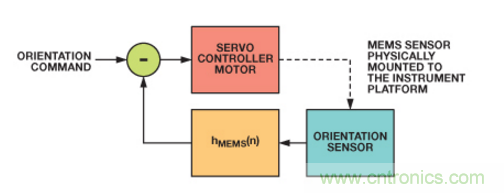
圖1. 基本平臺穩(wěn)定系統(tǒng)
由于很多穩(wěn)定系統(tǒng)需要多個軸向的主動校正,因此慣性測量單元(IMU)通常包括至少三個軸向的陀螺儀(測量角速度)和三個軸向的加速度計(測量加速度和角定向)來提供反饋檢測功能。反饋傳感器的最終目標(biāo)是提供平臺定向的精確測量,即使當(dāng)平臺正在運動時也要做到。由于沒有"萬能"傳感器技術(shù)能夠在任何條件下提供精確的角度測量,因此平臺穩(wěn)定系統(tǒng)中的IMU通常在每個軸上使用兩種或三種傳感器類型。
加速度計,響應(yīng)每個軸向上的靜態(tài)和動態(tài)加速
"靜態(tài)加速度"似乎是一個陌生的詞匯,但它涉及重要的傳感器行為:對重力的響應(yīng)。假定不存在動態(tài)加速,并通過校準(zhǔn)消除了傳感器誤差,則每個加速度計輸出將代表它的相對于重力的軸定向。為了確定在存在振動和快速加速的情況下穩(wěn)定系統(tǒng)中通常出現(xiàn)的實際平均定向,通常會將濾波器和融合程序(組合來自多個傳感器類型的讀數(shù),得出最佳估計值)應(yīng)用于原始測量。
陀螺儀,提供角速率測量
陀螺儀測量通過有限周期內(nèi)的角速率的積分,在角度測量中發(fā)揮作用。執(zhí)行積分時,偏置誤差將導(dǎo)致成比例的角度漂移,隨時間累加。因此,陀螺儀性能通常與設(shè)備偏置對不同環(huán)境因素的靈敏度相關(guān),這些因素包括溫度變化、電源變化、離軸旋轉(zhuǎn)和線性加速度(線性g和整流g × g)。校準(zhǔn)的高質(zhì)量陀螺儀,具有對線性加速度的高抑制,使這些設(shè)備能夠提供寬帶角信息,作為對加速度計提供的低頻信息的補充。
3軸磁力計,測量磁場強(qiáng)度
從三個正交軸的磁場測量實現(xiàn)了相對于地球磁場本地方向的定向角估算。當(dāng)磁力計接近電機(jī)、顯示器和其他動態(tài)磁場干擾源時,管理其精度可能非常困難,但在適當(dāng)情況下,它的角度數(shù)據(jù)可作為來自加速度計和陀螺儀的數(shù)據(jù)的補充。雖然很多系統(tǒng)僅使用加速度計和陀螺儀,但磁力計可以改進(jìn)某些系統(tǒng)的測量精度。
圖2的整體框圖顯示了如何使用陀螺儀和加速度計測量,既利用它們的基本優(yōu)勢,同時又最大程度減少它們的弱點產(chǎn)生的影響。
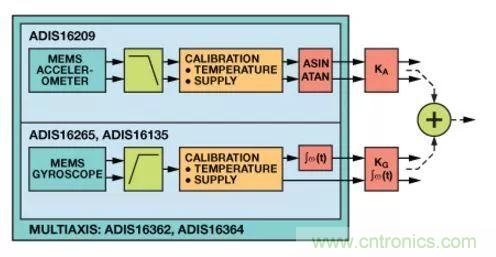
圖2. 組合單軸傳感器輸出
低通加速度計和高通陀螺儀濾波器的極點位置通常取決于應(yīng)用,另外精度目標(biāo)、相位延遲、振動和"正常"運動預(yù)測都會對位置決定產(chǎn)生影響。因系統(tǒng)而異的行為也會影響加權(quán)因子,而加權(quán)因子會對如何組合這兩種測量產(chǎn)生影響。擴(kuò)展卡爾曼濾波器就是一個組合濾波和加權(quán)函數(shù)以計算動態(tài)角度估計的算法的例子。
MEMS IMU 頻率響應(yīng)分析
圍繞新的MEMS IMU開發(fā)穩(wěn)定系統(tǒng)時,在系統(tǒng)設(shè)計早期階段了解頻率響應(yīng)是非常重要的,因為IMU的頻率響應(yīng)將對控制器設(shè)計產(chǎn)生直接影響,可以幫助識別潛在穩(wěn)定性問題—特別是在考慮到新一代設(shè)計的高帶寬解決方案時。這些信息對于預(yù)測陀螺儀的振動響應(yīng)也非常有用。
評估IMU帶寬的一種策略是確定哪些信息在產(chǎn)品文檔中提供,分析此類信息對系統(tǒng)的慣性運動響應(yīng)的影響,并穩(wěn)定系統(tǒng)的響應(yīng)。此類分析以及它涉及的所有校正操作將成為初始測試的基礎(chǔ)。
率響應(yīng)在IMU和陀螺儀的規(guī)格表中表示為"帶寬"。作為一個性能參數(shù),它表示某個頻率,輸出信號幅度在該頻率下降低到傳感器遇到的實際運動幅度的大約70% (–3 dB)。某些情況下,帶寬可也定義為輸出響應(yīng)落后于實際運動90度時的頻率(對于雙極系統(tǒng))。這兩個指標(biāo)可以直接影響控制環(huán)路的一個重要穩(wěn)定準(zhǔn)則:單位增益、相位裕量—環(huán)路響應(yīng)的實際相位角度和–180°之間的差值,環(huán)路增益為1。了解反饋傳感器的頻率響應(yīng),是優(yōu)化穩(wěn)定性保證和系統(tǒng)響應(yīng)之間的平衡的關(guān)鍵因素。除了管理穩(wěn)定性標(biāo)準(zhǔn)之外,頻率響應(yīng)還會對振動抑制和制定采樣策略產(chǎn)生直接影響,通過這些策略可以測量慣性平臺上的所有關(guān)鍵瞬態(tài)信息。
要分析系統(tǒng)中的頻率響應(yīng),首先要從一個高層次"黑盒子"視圖開始,它描述了系統(tǒng)在整個目標(biāo)頻率范圍內(nèi)對輸入的響應(yīng)。在電子電路中,輸入和輸出是從一般意義上定義的,例如信號電平(伏特),分析通常包括開發(fā)傳遞函數(shù),使用s域表示和電路-電平關(guān)系,例如基爾霍夫的電壓和電流定律。對于慣性MEMS系統(tǒng),輸入是IMU遇到的慣性運動,輸出通常以數(shù)字碼表示。s域分析技術(shù)固然有很大作用,但要為這種類型的系統(tǒng)開發(fā)完整的傳遞函數(shù),通常還需要采用其他技術(shù),并且考慮到更多問題。
開始分析過程時,首先要了解與傳感器信號鏈相關(guān)的所有組件。圖3提供了典型函數(shù)的整體示意圖。信號鏈從核心傳感器元件開始,它將慣性運動轉(zhuǎn)化為代表性的電信號。如果帶寬在傳感器元件中未受限制,則通常受ADC模塊前的信號調(diào)理電路中的濾波器限制。信號數(shù)字化后,處理器通常應(yīng)用糾錯(校準(zhǔn))公式和數(shù)字濾波。第二級的數(shù)字濾波器會減小反饋系統(tǒng)在控制程序中使用的帶寬和采樣速率。所有這些級都可能影響傳感器信號的增益和相位,與頻率相關(guān)。圖3提供了一個示例,IMU在混合信號處理系統(tǒng)中具有多個濾波器。該系統(tǒng)可作為一些實用分析技術(shù)的示例。
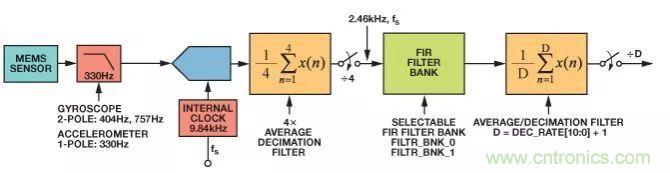
圖3. 信號鏈中用于頻率分析的ADIS16488傳感器
核心 MEMS 傳感器元件
要進(jìn)行此類分析,必須了解可以量化和應(yīng)該量化的所有行為,然后可對那些無法輕易量化的行為做出合理假設(shè)。充分了解"已知"可變因素之后,通??梢愿雍唵蔚刂匦略u估這些假設(shè)以進(jìn)行檢查和澄清。ADIS16488的規(guī)格表(圖3)顯示了330 Hz的–3 dB帶寬。假定核心傳感器處于臨界阻尼狀況,而且在遠(yuǎn)低于其諧振范圍(16 kHz至20 kHz)的帶寬下并非主要貢獻(xiàn)因素。這種情況并非總會出現(xiàn),但它是一個很好的起點,可以使用噪聲密度或完全運動測試,稍后在流程中測試到。
接口電路/模擬濾波器
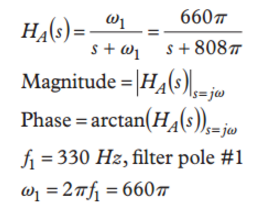
此外,每個陀螺儀傳感器在通過ADC模塊之前都會通過雙極低通濾波器。這樣可以提供足夠的信息,以便使用拉普拉斯變換來開發(fā)S域中的傳遞函數(shù)表示。第一極(f1)的頻率為404 Hz,第二極(f2) 的頻率為757 Hz。
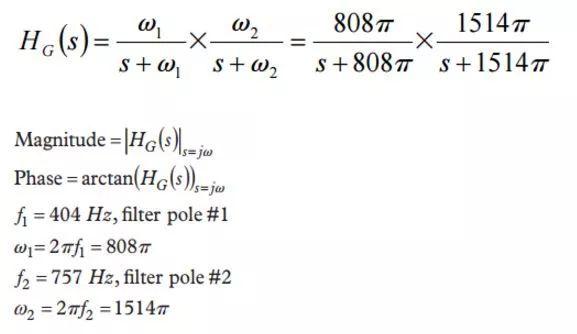
加速度計的單極 (f1)傳遞函數(shù)為:
這些公式為程序中的數(shù)字分析提供了依據(jù),這些程序可管理與"s = jω"恒等式相關(guān)的復(fù)數(shù)。在MATLAB中,以下的m-腳本將生成幅度(比率,無單位)和相位(度)信息:
Fmax = 9840/2; % one-half of the sample rate
for f = 1:Fmax
w(f) = 2*pi*f;
end
p1 = 404; % pole location = 404Hz
p2 = 757; % pole location = 757Hz
NUM1 = 2*pi*p1;
DEN1 = [1 2*pi*p1];
NUM2 = 2*pi*p2;
DEN2 = [1 2*pi*p2];
H1 = tf(NUM1,DEN1); % transfer function for first pole
H2 = tf(NUM2,DEN2); % transfer function for second pole
H488a = H1 * H2; % transfer function for 2-pole filter
[maga,phasea] = bode(H488,w);
for f = 1:Fmax
Mag488a(f) = maga(1,1,f);
Phase488a(f) = phasea(1,1,f);
end
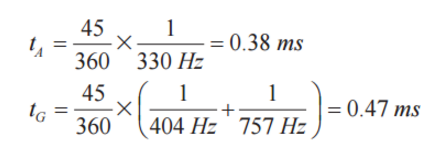
為快速評估與這些濾波器相關(guān)的時間延遲,請注意單極濾波器的相位延遲在−3 dB頻率下等于45°,也就是轉(zhuǎn)折頻率周期的1/8。在此情況下,加速度計的濾波器的時間延遲大約等于0.38 ms。對于陀螺儀,延遲等于兩級的時間延遲的總和,約為0.47 ms。
均值/抽取濾波器級
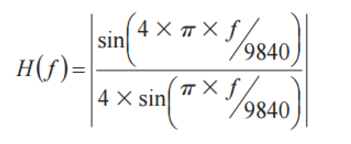
圖3說明了兩個均值/抽取濾波器級的使用,它們可以降低級的輸出采樣速率,并且提供額外的濾波。在具有有限脈沖響應(yīng)(FIR)的數(shù)字濾波器中,相位延遲等于總抽頭數(shù)的一半,除以每個抽頭的采樣速率。在第一個濾波級,采樣速率為9.84 kHz。有四個抽頭,在此種類型的濾波器中,這個數(shù)字等于均值數(shù)量。相位延遲約為0.2 ms。均值濾波器的幅度響應(yīng)遵循這種關(guān)系
使用MATLAB進(jìn)行分析時,請使用9.84 kSPS的采樣速率(fs)和4個抽頭(N),以及用于分析模擬濾波器的相同頻率數(shù)組(N)。使用相同頻率數(shù)組,可以更加簡單地組合每級的結(jié)果。請使用以下代碼來分析第一級:
Fmax = 9840/2; % one-half of the sample rate
f = 1:Fmax;
NUM(f) = sin(4*pi*f/9840);
DEN(f) = 4 * sin(pi*f/9840);
for fq = 1:Fmax
Hda(fq) = abs(NUM(fq)/DEN(fq));
end
要分析第二個均值/抽取濾波器,需要事先了解控制系統(tǒng)的采樣速率,但應(yīng)使用相同的關(guān)系。例如,如果控制環(huán)路需要接近400 SPS的采樣速率,則第二個濾波器的均值和抽取率將等于6(采樣速率為410 SPS,有四個樣本,因此為9840/[410 × 4] = 6)。使用相同的m-腳本代碼可分析幅度響應(yīng),有三個例外:(1) 將采樣速率從9480更改為2460;(2) 將兩個位置的"4"更改為"6";以及 (3) 將FMAX從9840/2更改為2460/2。相位等于總抽頭數(shù)的一半,除以采樣速率,約為1.22 ms (3/2460)。
復(fù)合響應(yīng)
圖4和圖5提供了復(fù)合幅度和相位響應(yīng),包括陀螺儀的模擬濾波器和兩個抽取濾波器。圖4表示針對數(shù)組中的每個頻率,將各級的幅度相乘的結(jié)果。圖5表示將每個頻率下的各級的相位貢獻(xiàn)相加的結(jié)果。標(biāo)記"沒有抽取"的坐標(biāo)圖假定輸出數(shù)據(jù)速率為2460 SPS,第二個抽取濾波器級有效關(guān)閉。標(biāo)記"有抽取"的坐標(biāo)圖假定抽取率等于6,最終輸出數(shù)據(jù)速率為410 SPS。兩個坐標(biāo)圖說明了響應(yīng)差異,幫助實現(xiàn)控制環(huán)路采樣速率和相應(yīng)頻率響應(yīng)的系統(tǒng)級平衡。
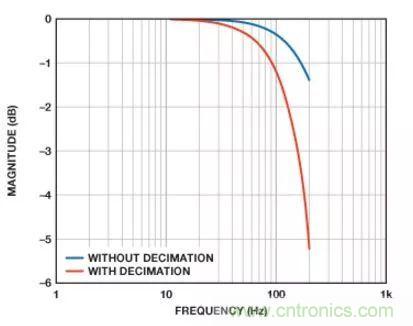
圖4. 模擬濾波器和第一個抽取濾波器級
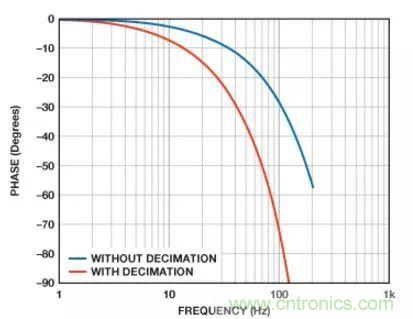
圖5. 410-SPS數(shù)據(jù)速率的復(fù)合響應(yīng)
可編程FIR濾波器分析
知道模擬濾波器和抽取濾波器的貢獻(xiàn)之后,我們可以評估使用片內(nèi)抽取濾波器和設(shè)計自定義FIR濾波器之間的比較權(quán)衡。在圖3所示的ADIS16488中,F(xiàn)IR濾波器包括在IMU中,但有些系統(tǒng)在數(shù)字信號處理程序中實施濾波器。FIR濾波器的時域f(n) 以差分方程表示,其中z變換提供了用于頻率分析的分析工具:
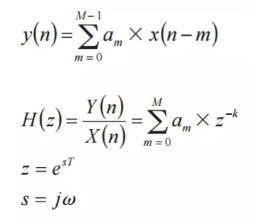
幸運的是,很多現(xiàn)代程序都包含根據(jù)基本關(guān)系進(jìn)行此類分析的特定工具或命令。但在驗證自動評估工具的結(jié)果或?qū)IR設(shè)計工具輸出產(chǎn)生直覺的疑問時,了解它們?nèi)匀皇怯杏玫?。MATLAB"fdatool"命令可啟動濾波器分析和設(shè)計軟件包,幫助設(shè)計和分析系統(tǒng)FIR濾波器實施。
慣性頻率響應(yīng)測試方法
在陀螺儀中測試頻率響應(yīng)的最直接方法是使用慣性速率表,它能夠引入適當(dāng)?shù)念l率成分。速率表通常包括可編程伺服電機(jī)和光學(xué)編碼器,可驗證電機(jī)軸上的編程旋轉(zhuǎn)。這種測試方法的優(yōu)勢是它應(yīng)用了實際慣性運動。它的弱點在于它通常不適用于剛開始使用MEMS的工程師。
對于未使用速率表的早期分析驗證,測試目標(biāo)頻段內(nèi)的頻譜噪聲可以提供有用的信息。這種簡化方法不需要復(fù)雜的測試設(shè)備,而只需要與穩(wěn)定平臺的安全機(jī)械連接以及數(shù)據(jù)收集儀表。但是,它要求機(jī)械噪聲具有相對于頻率的"平坦"噪聲幅度。
圖6詳細(xì)說明了使用相同雙極低通濾波器的兩個例子。第一個例子 (ADIS16375)使用了在有用頻率范圍內(nèi)具有平坦響應(yīng)的陀螺儀。第二個例子(ADIS16488)使用在1.2 kHz頻率下具有適中峰化量的陀螺儀,它實際上將–3 dB頻率擴(kuò)展到大約380 Hz。對于在為控制環(huán)路進(jìn)行建模和仿真的人員而言,了解這種共振行為可能是非常有價值的。在簡單測試中識別這種行為,還有助于解釋在執(zhí)行更全面系統(tǒng)特征化時噪聲電平高于預(yù)期的原因。如果在項目早期了解和識別這些行為,則通??赏ㄟ^對濾波器極點的調(diào)整,對它們進(jìn)行管理。
測量噪聲密度時,請確保采樣速率至少達(dá)到最高目標(biāo)頻率的兩倍,以滿足奈奎斯特準(zhǔn)則。此外,還應(yīng)提取足夠的數(shù)據(jù)樣本,以降低測量的不確定性。圖6中的坐標(biāo)圖源于FFT時間記錄分析,長度為256000個采樣,最大速率為2.46 kSPS。
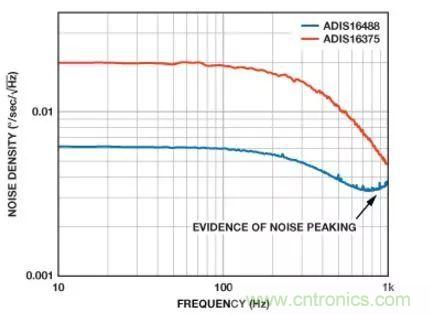
圖6. 噪聲密度比較
另一種方法使用了陀螺儀的自測功能。自測功能提供了使用電氣信號來模擬傳感器的機(jī)械結(jié)構(gòu)的機(jī)會,而無需對設(shè)備施加外部慣性運動。自測功能迫使模擬對實際運動的響應(yīng)的傳感器內(nèi)核中發(fā)生變化,從而在電氣輸出上產(chǎn)生相應(yīng)變化。并非所有產(chǎn)品都提供對此信息的實時訪問,但它可能是一種有用工具,另外制造商或許能夠提供此種類型的頻率-響應(yīng)測試的數(shù)據(jù)。在最簡單的方法中,可將自測(模擬對步驟的響應(yīng))與分析預(yù)期結(jié)果進(jìn)行比較。重復(fù)在特定頻率下的自測置位,也是一種研究每個頻率下的傳感器響應(yīng)幅度的直接方法。以圖7中的兩種不同響應(yīng)為例。在較低頻率下,陀螺儀輸出類似于方波,每個轉(zhuǎn)換的瞬態(tài)響應(yīng)除外。瞬態(tài)響應(yīng)符合傳感器信號鏈中的濾波器網(wǎng)絡(luò)的"步驟響應(yīng)"預(yù)期。在第二個示例中,自測的頻率足夠高,能夠防止完全建立,因而發(fā)生了幅度減小。請注意在本圖底部信號上,藍(lán)色和黑點響應(yīng)之間的幅度差異。有多種方法可以估測這些時間記錄的幅度。離散傅里葉變換(DFT)可將主要頻率成份(自測頻率)與諧波內(nèi)容隔離開,這可能導(dǎo)致幅度/頻率響應(yīng)的誤差。
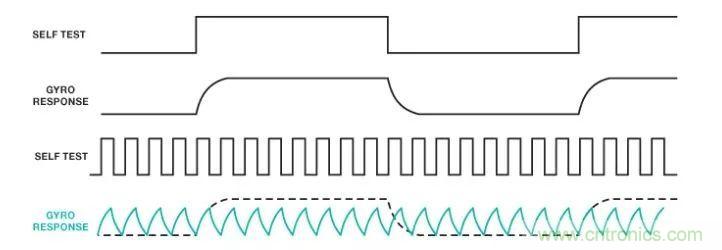
圖7. 自測
結(jié)論
向高帶寬IMU發(fā)展的趨勢為反饋穩(wěn)定系統(tǒng)的設(shè)計提供了顯著優(yōu)勢。高帶寬使得多傳感器系統(tǒng)能夠?qū)崿F(xiàn)更好的時序?qū)R和相位裕量管理。濾波電容的值和溫度響應(yīng)的變化范圍可能非常廣,可能導(dǎo)致極點頻率的成比例變化。由于相位延遲取決于極點位置,因此了解和管理極點位置非常重要。例如,當(dāng)反饋傳感器的截止頻率比控制器的單位增益反饋高兩倍時,則會為環(huán)路響應(yīng)增加大約22.3°的相位延遲。如果截止頻率降低20%,則相位延遲增加大約5.6°。提高單位增益帶寬中的截止頻率的比率,可將這些影響減小4倍。
要了解IMU的帶寬及其在系統(tǒng)穩(wěn)定性中的角色,應(yīng)該使用分析、建模、測試數(shù)據(jù)以及這些因素的迭代。首先要量化可用信息,做出假設(shè)以彌補所有漏洞,然后制定計劃來優(yōu)化這些假設(shè)。
推薦閱讀:




