
【導(dǎo)讀】3D深度視覺作為一個嶄新的技術(shù),已經(jīng)出現(xiàn)在微軟Kinect、英特爾RealSense等消費級產(chǎn)品中,隨著硬件端技術(shù)的不斷進步,算法與軟件層面的不斷優(yōu)化,3D深度視覺的精度和實用性得到大幅提升,尤其是TOF方案與VCSEL的快速成熟,使得“深度相機+手勢/人臉識別”具備了大規(guī)模進入移動智能終端的基礎(chǔ)。
我們通過本報告,詳細地梳理了3D深度視覺不同技術(shù)方案與硬件結(jié)構(gòu)的差異,分析了國外公司在相關(guān)技術(shù)領(lǐng)域的布局。我們相信3D深度視覺進入消費級智能終端將是大勢所趨,這將為VCSEL、紅外CIS攝像頭(含紅外窄帶濾色片)、模組封裝帶來新的市場增量。移動端手勢/人臉識別帶來顛覆性全新的用戶體驗,預(yù)計將實現(xiàn)快速的滲透與普及,由于消費級智能終端龐大的用戶數(shù)量,這將創(chuàng)造一個龐大的新市場。
相關(guān)產(chǎn)業(yè)鏈?zhǔn)芤婀荆?/strong>
綜合技術(shù)方案提供商——海外:微軟、英特爾等科技巨頭,德州儀器、意法、英飛凌、AMS(收購Heptagon)等芯片巨頭,SoftKinetic(索尼)、PrimeSense(蘋果)、LeapMotion等明星公司;國內(nèi):舜宇光學(xué)。
系統(tǒng)模組封裝——海外:LG Innotek、Sharp等;國內(nèi):舜宇光學(xué)、歐菲光等。
VCSEL設(shè)計——Finsar、Lumentum、Princeton Optronics、Heptagon、ⅡⅥ等公司。國內(nèi)相關(guān)標(biāo)的:光迅科技等。
VCSEL代工與封測——海外:全新、聯(lián)亞光電(外延片),宏捷科、穩(wěn)懋(代工),聯(lián)鈞、矽品、同欣(封測)。國內(nèi)相關(guān)標(biāo)的:三安光電等。
紅外與可見光攝像頭——海外:大立光、玉晶光電、奇景光電、索尼、三星等;國內(nèi)相關(guān)標(biāo)的:北京君正(擬并購豪威)、舜宇光學(xué)、歐菲光、丘鈦科技等。
紅外濾色片——海外:VIAVI等;國內(nèi):水晶光電等。
圖像處理芯片——海外:德州儀器、意法半導(dǎo)體、英飛凌、恩智浦等;國內(nèi):全志科技、北京君正、瑞芯微(國內(nèi)相關(guān)主題標(biāo)的)。
DOE與LENS——海外:奇景光電、精材、采鈺、臺積電等;
投資要點:
移動端3D深度視覺技術(shù)加速,有望創(chuàng)造一個全新的大市場。我們通過本報告,詳細地梳理了3D深度視覺不同技術(shù)方案與硬件結(jié)構(gòu)的差異,分析了國外公司在相關(guān)技術(shù)領(lǐng)域的布局。
我們相信3D深度視覺進入消費級智能終端將是大勢所趨,隨著硬件端技術(shù)的不斷進步,算法與軟件層面的不斷優(yōu)化,3D深度視覺的精度和實用性得到大幅提升,這將為VCSEL、紅外CIS帶來新的市場增量。
移動端手勢/人臉識別帶來顛覆性全新的用戶體驗,預(yù)計將實現(xiàn)快速的滲透與普及,由于消費級智能終端龐大的用戶數(shù)量,這將創(chuàng)造一個龐大的新市場。
移動端3D深度相機助力智能人機交互進入新時代。從鍵盤、鼠標(biāo),到手寫筆,再到觸控顯示屏,人機交互的大幅進步引領(lǐng)了消費電子的成功。但觸控顯示有著明顯的局限性,限制了用戶的使用靈活性。
基于3D視覺的手勢/人臉識別將對現(xiàn)有的消費電子產(chǎn)品產(chǎn)生顛覆性的變化,帶來全新的用戶體驗,打開更加廣闊的空間,在體感交互、運動控制、身份認證等方面大幅提升用戶體驗。
巨頭持續(xù)發(fā)力,提前布局移動端3D視覺。一旦手勢識別進入大規(guī)模普及,將對現(xiàn)有的消費電子產(chǎn)品產(chǎn)生顛覆性的影響,人機交互將進入全新的時代。
因此,包括蘋果、谷歌、微軟、英特爾、索尼、三星等科技巨頭,均在深度相機、體感交互、動作捕捉等領(lǐng)域展開了深度的布局,或內(nèi)部成立專門的研發(fā)團隊,或并購創(chuàng)業(yè)型公司,快速獲得先進的技術(shù),在技術(shù)方面實現(xiàn)儲備。
TOF方案技術(shù)水平大幅提升,移動端3D視覺已具備大規(guī)模普及的基礎(chǔ)。目前在3D深度視覺領(lǐng)域,主流的方案為結(jié)構(gòu)光、TOF和雙目立體成像。TOF方案響應(yīng)速度快、深度信息精度高、識別距離范圍大、不易受環(huán)境光線干擾,因此是移動端3D視覺比較可行的方案。
近年來,在德州儀器、意法半導(dǎo)體、英飛凌、微軟等巨頭公司的推動之下,TOF方案已經(jīng)越來越成熟,尤其是VCSEL技術(shù)的進步,使得TOF方案已經(jīng)具備了在移動端大規(guī)模普及的基礎(chǔ)。
移動端3D視覺為VCSEL和紅外CIS攝像頭帶來市場新增量。如果3D深度視覺進入移動端應(yīng)用的話,VCSEL將是重要的部件,原因就在于VCSEL可以提供高頻的調(diào)制、更快的響應(yīng)速度、高質(zhì)量的光束,同時功耗低,工藝兼容性好。
由于目前絕大多數(shù)智能終端已經(jīng)具備可見光前置和后置攝像頭,因此,3D視覺進入消費級智能終端之后,會增加紅外攝像頭的需求。同時3D視覺也將使紅外窄帶濾色片受益。
行業(yè)“增持”評級,關(guān)注優(yōu)勢企業(yè)。目前海外公司在3D視覺領(lǐng)域較為領(lǐng)先,包括:綜合技術(shù)方案提供商——微軟、英特爾等巨頭,德州儀器、意法、英飛凌、AMS(收購Heptagon)等芯片巨頭,SoftKinetic(索尼)、PrimeSense(蘋果)、LeapMotion等明星公司;系統(tǒng)模組封裝——LG Innotek、Sharp等;VCSEL設(shè)計——Finsar、Lumentum、Princeton Optronics、Heptagon、ⅡⅥ等公司。
臺灣公司在VCSEL代工和攝像頭方面比較領(lǐng)先,VCSEL由全新、聯(lián)亞光電等提供外延片,然后由宏捷科、穩(wěn)懋等進行晶圓制造,再經(jīng)過聯(lián)鈞、矽品、同欣(基板)等的封測,攝像頭方面有大立光、玉晶光電、奇景光電等。DOE與LENS光學(xué)器件——Heptagon、奇景光電、精材科技、臺積電等。
國內(nèi)方面:綜合技術(shù)方案與模組封裝提供商——舜宇光學(xué);VCSEL發(fā)射器——光迅科技、三安光電;紅外與可見攝像頭——北京君正(擬收購豪威)、舜宇光學(xué)、歐菲光、丘鈦科技;紅外窄帶濾色片——水晶光電;圖像處理芯片——全志科技、北京君正等。
風(fēng)險提示:3D視覺技術(shù)移動端進程過慢;國內(nèi)相關(guān)公司缺乏競爭力。
1.3D深度相機助力智能人機交互進入新時代
1)從按鍵、觸控筆到觸摸屏,智能交互的進步助力智能手機的輝煌
人機交互(簡寫HCI),是指人與計算機之間使用某種對話語言,以一定的交互方式,為完成確定任務(wù)的人與計算機之間的信息交換過程。
在上世紀(jì)計算機高速發(fā)展的過程中,除了硬件芯片技術(shù)和軟件系統(tǒng)技術(shù)的突飛猛進之外,鍵盤和鼠標(biāo)這兩大交互設(shè)備的出現(xiàn),極大地推動了計算機在普通消費市場的應(yīng)用,普通用戶可以通過鍵盤和鼠標(biāo),來實現(xiàn)與計算機和網(wǎng)絡(luò)的交互。

手機可以說是最近二十年里最成功的消費電子產(chǎn)品,而手機的發(fā)展史也伴隨著人機交互方式的變遷,可以說人機交互的變革在一定程度上促進了手機的輝煌。

2002年左右,大尺寸顯示技術(shù)更加成熟,手機正面的按鍵由于太占面積,而被大尺寸的屏幕所取代,為實現(xiàn)更加方便的交互,觸控筆開始出現(xiàn),并且得到了普及。隨著無線通訊和手機性能的提升,手機可以像電腦一樣工作,2005年出現(xiàn)的黑莓手機,采用全鍵盤設(shè)計,實現(xiàn)快速辦公。
2007年蘋果手機的橫空出世,宣告了智能手機新時代的到來,蘋果手機憑借其突破性的大尺寸觸控顯示、豐富的APP內(nèi)容資源、優(yōu)質(zhì)的拍照和音樂體驗以及出色的產(chǎn)品質(zhì)量,成為了全球智能手機皇冠上的明珠。
尤其是第一代蘋果手機配有的大尺寸觸控顯示屏幕,具有劃時代的意義,為消費者帶來了前所未有的用戶體驗,引領(lǐng)越來越多消費者選擇智能手機。
根據(jù)IDC的統(tǒng)計數(shù)據(jù),2008年全球智能手機出貨量為1.5億部,到2015年提升到14.3億部,復(fù)合年均增速38.0%,尤其是2010-2013年間,增速在60%左右。如果與PC電腦相比的話,智能手機在2007到2011年的5年時間內(nèi),出貨量就超過了已經(jīng)發(fā)展30多年的個人電腦(從1980年到2011年)。

2)3D深度相機將進一步解放雙手,打開新的智能人機交互空間
現(xiàn)如今,大尺寸觸控顯示屏已經(jīng)是大多數(shù)智能終端的標(biāo)配,無論是智能手機、平板電腦,還是筆記本電腦,甚至于汽車中控臺、智能家電等。

盡管觸控顯示屏的識別精度和清晰度越來越高,但是,觸控顯示屏的局限性非常明顯:手指必須接觸于屏幕表面,無法離開屏幕工作,這極大地限制了用戶的使用空間和靈活性,為了解決這一問題,語音控制與體感控制開始出現(xiàn),并被廣泛看好。

蘋果公司于2011年推出的iPhone4S配備了語音識別助手Siri,利用人工智能技術(shù),通過與消費者的語言對話,實現(xiàn)信息的交互。隨后,語音交互越來越多地出現(xiàn)在智能終端上,尤其是隨著人工智能語義識別技術(shù)的進步,語音交互的準(zhǔn)確性和實用性大幅提升。亞馬遜于2015年推出的ECHO智能音箱便是典型成功例子。
語音識別可以完全解放雙手,但是在人機互動方面的應(yīng)用場景有一定的局限性,對于游戲娛樂、互動體驗、拍照等領(lǐng)域,這些必須有用戶肢體參與的場景,語音交互無法滿足需求。因此,比現(xiàn)今觸控屏更高層次的體感交互成為了廣大廠商追求的目標(biāo)。

要實現(xiàn)體感交互,最重要的就是手勢識別,因為手部動作是人體最豐富也是最常用的體感動作。對于智能手機而言,如果手勢識別可以得到應(yīng)用,那么包括手機自拍、游戲、瀏覽網(wǎng)頁、購物等眾多應(yīng)用場景,在用戶體驗上均可以實現(xiàn)大幅提升,手機也將從觸控屏?xí)r代走向手勢識別時代。

同時,人臉識別與追蹤也是體感交互最具前景的方向之一。我們認為,人臉識別在移動端具有更加廣闊的應(yīng)用空間。例如目前指紋識別已經(jīng)成為智能手機的標(biāo)配,通過指紋識別來實現(xiàn)開機、支付、登陸確認等功能已經(jīng)被大眾所認可,并且創(chuàng)造了巨大的市場價值,但是指紋識別的局限性在于必須通過手指完成,手指放置的位置、手指表面的潔凈度等因素都會極大地影響使用體驗,而人臉識別可以完全解放雙手,只需要借助攝像頭對人臉信息的采集便可以完成識別與交互。

3)手勢識別被廣泛看好,前景廣闊
無論是消費級市場的游戲、娛樂、交互,還是商業(yè)領(lǐng)域的醫(yī)療、工業(yè)、軍事等,都需要豐富的手部動作來參與,因此手勢識別具有非常廣泛的應(yīng)用場景。

當(dāng)然,智能手機市場才是最吸引人的市場,因為智能手機可以說已經(jīng)成為全球幾十億用戶的生活必需品,智能手機龐大的用戶數(shù)量以及用戶每日超長的使用時間,都將帶來巨大的市場價值。
手機中集成手勢識別將帶來眾多的益處,包括:全新的用戶界面實現(xiàn)了超越觸摸屏的更深層次的控制功能,并將引領(lǐng)游戲和智能手機控制進入全新時代;新的控制感知更為靈活,戴著手套或是手不干凈時也可進行控制;帶來更豐富的用戶體驗,它無需機械開關(guān)、無需觸摸屏或按鈕就可實現(xiàn)家居自動化。

受益于游戲機、PC電腦以及平板等移動裝置的技術(shù)整合,市場研究機構(gòu)ABI Research預(yù)估,全球眼球追蹤、手勢以及距離傳感器技術(shù)領(lǐng)域在2016年創(chuàng)造近50億美元的收入。
根據(jù)IHS的數(shù)據(jù),2014 年全球手勢識別與傳感器市場達到了31.2億美元的規(guī)模,過去幾年的復(fù)合年增長率為32.78%,預(yù)計到2022年該市場規(guī)模預(yù)計將達321.6億美元。技術(shù)進步使硬件精度大幅提升,從而進一步拉升了對手勢識別與傳感器市場的需求。在智能手機與汽車領(lǐng)域,手勢識別與傳感器市場呈現(xiàn)指數(shù)增長,其中的關(guān)鍵因素為硬件成本低廉,同時可大幅改善用戶體驗。
4)人臉識別從專業(yè)市場走向消費市場,應(yīng)用領(lǐng)域大幅擴寬
早期的人臉識別主要用于身份認證與安全檢測,主要針對專業(yè)市場。例如在金融、政府、軍事、海關(guān)、監(jiān)獄等機密單位,通過人臉識別完成用戶身份的驗證與權(quán)限的檢測等。隨著人臉識別算法的不斷優(yōu)化,人臉識別技術(shù)不再局限于簡單的單體身份認證,而是擴展至群體的安防監(jiān)控領(lǐng)域。

正如我們前文所述,人臉識別更大的機會在于消費級市場,人臉識別在移動端具有更加廣闊的應(yīng)用空間,而目前人臉識別向消費市場滲透的趨勢越發(fā)明顯,尤其是在人臉識別技術(shù)逐步提升的背景之下。
例如,人臉識別可以替代手勢識別完成移動端的身份認證、支付交易確認、權(quán)限登錄等功能;人臉識別直接獲取消費者面部表情、生理年齡或精神狀態(tài);人臉識別用于移動端自拍的快速對焦,用戶自拍美顏等功能……

2.主要巨頭在移動端3D視覺領(lǐng)域的布局
1)蘋果——整合行業(yè)先驅(qū)PrimeSense,發(fā)力3D手勢與人臉識別
2013年11月,蘋果收購以色列3D傳感器生產(chǎn)商PrimeSense,收購費用為3.45億美元。PrimeSense曾以給微軟Kinect體感控制器提供3D技術(shù)著稱,它將玩家的動作作為Xbox游戲的一部分,這些傳感器允許玩家無需使用控制器就可跟游戲系統(tǒng)相連。

2010年年底,PrimeSense與華碩合作開發(fā)了Xtion Pro,和Kinect采用了同樣的3D傳感器,在PC上使用。2012年,PrimeSense推出了當(dāng)時世界上體積最小的3D傳感器Capri,它的分辨率是前代產(chǎn)品的3倍,而體型是前代的十分之一,環(huán)境光的檢測性能是前代的50倍。自2013年收購PrimeSense之后,蘋果推動PrimeSense的3D體感控制器向小型化發(fā)展,希望可以將其裝配到電視、PC上,最終可以用在未來的iPhone上。
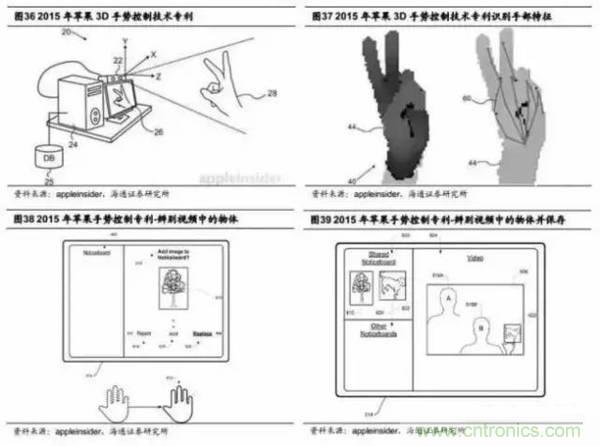
2016年7月,蘋果再次公布新型3D手勢控制專利,是一個圖形投影儀,內(nèi)嵌在一個諸如如iPhone手機這樣的iOS設(shè)備上,可以識別出用戶的手勢操作,由此可以作為把手勢作為游戲的控制桿或者控制器。

2017年1月15日,美國權(quán)威咨詢機構(gòu)Cowen and Company發(fā)布報告稱,蘋果的下一代iPhone可能會包含某種面部識別或手勢識別功能,由安裝在前置攝像頭附近的一款新的激光發(fā)射器和紅外感應(yīng)器支持,新款iPhone可能會配備一種新的深度感應(yīng)器,可以為未來的iPhone增添手勢識別、人臉識別,甚至增強現(xiàn)實AR功能。

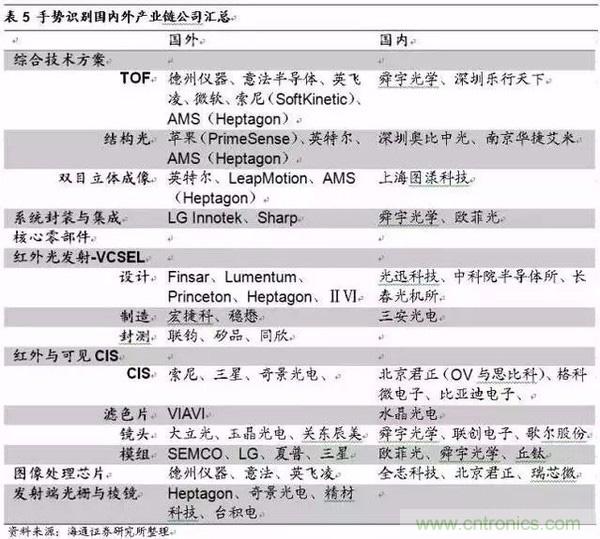
2)英特爾——持續(xù)強化升級RealSense,“結(jié)構(gòu)光+雙目立體光”
早在2012年左右,英特爾便著重研發(fā)實感技術(shù),當(dāng)時叫Perceptual Computing,即感知計算,并開放英特爾感知計算軟件開發(fā)套件2013版。2013年1月,英特爾聯(lián)合Nuance等多家公司推出了“感知計算”,類似于微軟的Kinect,可進行手勢與人臉識別,缺點是設(shè)備體積大,必須借助PC電腦完成。

前置實感3D攝像頭和Kinect原理一樣,它的工作原理是“結(jié)構(gòu)光”,需要一顆紅外傳感器。遠距離的3D攝像頭,使用“雙目主動立體成像原理”,需要兩顆紅外傳感器。后文我們會詳細拆解與分析。
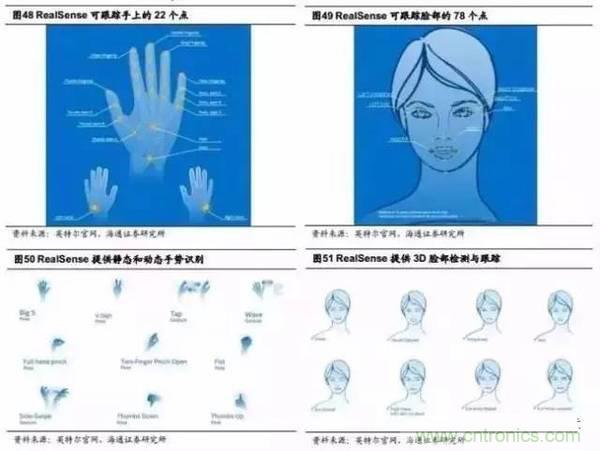
經(jīng)過多年的努力,英特爾目前可以提供包括SR300獨立攝像頭、R200遠距離后置攝像頭(3-4米,室內(nèi)室外使用,640*480分辨率)、F200近距離前置攝像頭(0.2-1.2米,室內(nèi)使用,640*480分辨率)等硬件產(chǎn)品。
3)微軟——從Kinect到Handpose,3D識別精度大幅提升
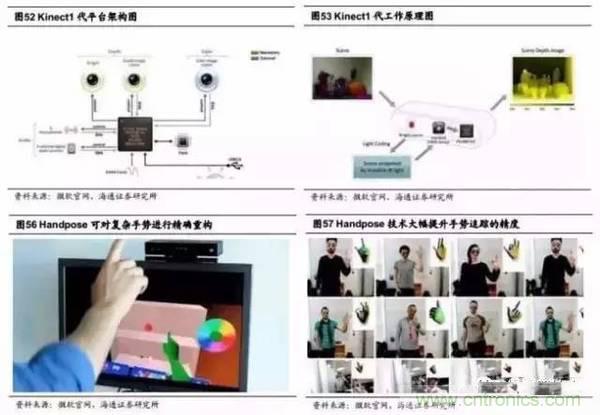
微軟是最早涉足3D視覺的公司之一,公司在游戲領(lǐng)域推出XBOX游戲機,志在與索尼和任天堂的游戲機一較高下,為了形成自己的競爭優(yōu)勢,微軟在2010年與PrimeSense合作,推出了XBOX360體感周邊外設(shè)——Kinect1代。
但是,當(dāng)時采用結(jié)構(gòu)光原理的Kinect1代的游戲體驗并不好,產(chǎn)品的準(zhǔn)確度、圖像的分辨率和響應(yīng)速度一直不理想。最大的問題是精度很難提高,因為計算斑點位移需要用圖像在一個小范圍區(qū)域內(nèi)的來做塊匹配,導(dǎo)致犧牲了像素級別的細節(jié),凸凹不平的表面、物體邊緣、很細的物體很難檢測準(zhǔn)確的深度。
2012年微軟先后收購了TOF(時間光)相機公司canesta和3dv,2013年微軟終止與PrimeSense的合作,自行開發(fā)了Kinect2代(成為Kinect one),采用的是TOF(時間光)原理,無論精度、分辨率還是響應(yīng)時間都得到了很大的提升。
TOF原理發(fā)射一個強度隨時間周期變化的正弦信號,通過獲得發(fā)射、接受信號的相位差來計算深度,精度高很多。關(guān)于Kinect2代的原理分析我們將在后文詳細闡述。
4)谷歌——Tango項目野心勃勃,提前布局移動端3D視覺
Project Tango是谷歌公司的明星研究項目,由谷歌先進技術(shù)與項目部門和部分研究人員,以及硅谷Movidius(已被英特爾收購)合作研發(fā),后者提供的芯片技術(shù)可以分析和表達來自傳感器和攝像頭的數(shù)據(jù)。Project Tango項目的目標(biāo)是希望將人類的視覺帶入移動設(shè)備,為移動設(shè)備加入類似人類對空間和運動的感知能力。
Project Tango包含三塊技術(shù):運動追蹤(MotionTracking),深度感知(Depth Perception)和區(qū)域?qū)W習(xí)(Area Learning)。首先是運動追蹤,設(shè)備可以通過內(nèi)置的姿態(tài)傳感器(加速度計和陀螺儀等)來感知當(dāng)前的位置;接下來是更深入的3D識別,可以檢查出周圍世界環(huán)境的形狀,類似于英特爾的RealSense 3D攝像技術(shù),可以獲得更準(zhǔn)確的姿態(tài)控制以及3D對象渲染;最后就是對周圍的環(huán)境和區(qū)域繪制地圖。

5)索尼——收購明星企業(yè)SoftKinetic,彌補短板
2015年10月,SONY 宣布收購比利時傳感器技術(shù)提供商SoftKinetic。SoftKinetic是一家專門從事深度傳感攝像頭技術(shù)的電腦視覺初創(chuàng)型企業(yè),成立于2007年,專注研發(fā)體感技術(shù),其傳感器技術(shù)能夠追蹤諸如手勢等相關(guān)的圖像。
SoftKinetic技術(shù)能夠部署到安裝在增強現(xiàn)實和虛擬現(xiàn)實硬件上的攝像頭之中,從而增加手勢與面部追蹤的能力。SoftKinetic公司的攝像機采用TOF方案。

6)三星——手勢識別助力凌空操作Gear VR
科技公司Gestigon和Pmd在16年6月宣布在三星GearVR上合作研發(fā)手勢識別,結(jié)合Pmd的CamBoard pico flexx深度傳感器和Gestigon的Carnival AR/VR Interaction Suite(增強/虛擬現(xiàn)實互動套件),在現(xiàn)有的VR設(shè)備上進行無觸摸手勢交互。

3.移動端3D視覺主要技術(shù)背景與原理分析
1)計算機視覺技術(shù)主要分類
如同人眼可以對所見到的圖像信息進行分析與判斷一樣,計算機視覺技術(shù)的目的就是用攝影機和電腦代替人眼對目標(biāo)進行識別、跟蹤和測量等機器視覺,并進一步做圖形處理,使電腦處理成為更適合人眼觀察或傳送給儀器檢測的圖像。
計算機視覺技術(shù)的發(fā)展主要經(jīng)歷了:二維圖像靜態(tài)識別、二維圖像動態(tài)識別、三維圖像動態(tài)識別三個階段。
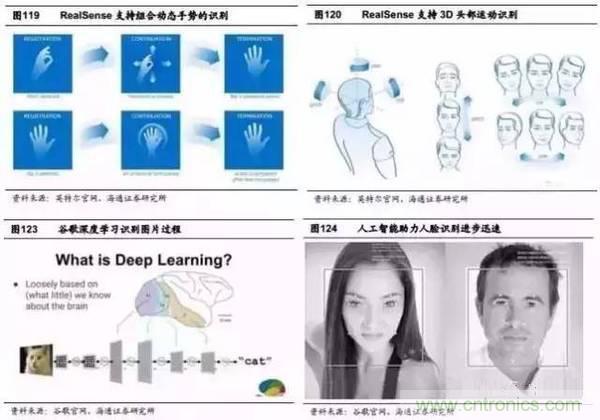
我們以手勢識別技術(shù)為例,可以粗略分為兩個階段:二維手勢識別和三維手勢識別,二維手勢識別又可以劃分為二維手型識別和二維手勢識別。
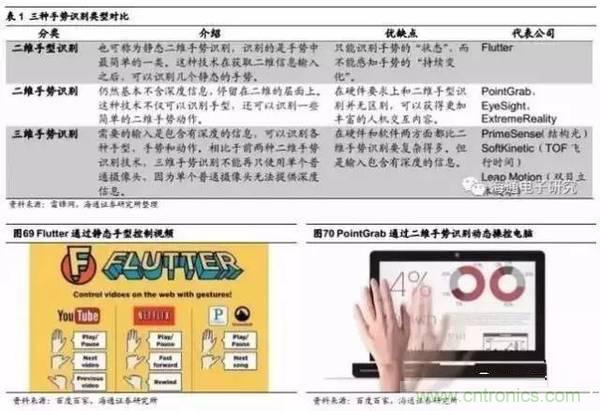
相比較二維手勢識別,三維手勢識別增加了一個Z軸的信息,它可以識別各種手型、手勢和動作。三維手勢識別也是現(xiàn)在手勢識別發(fā)展的主要方向。不過這種包含一定深度信息的手勢識別,需要特別的硬件來實現(xiàn),常見的有通過紅外光+光學(xué)傳感器來完成。

2)三種主流的3D機器視覺技術(shù)
根據(jù)硬件實現(xiàn)方式的不同,目前行業(yè)內(nèi)所采用的主流3D機器視覺大約有三種:結(jié)構(gòu)光、TOF時間光、雙目立體成像。

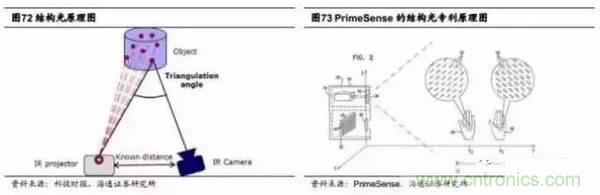
結(jié)構(gòu)光(Structure Light)
通過激光的折射以及算法計算出物體的位置和深度信息,進而復(fù)原整個三維空間。結(jié)構(gòu)光的代表產(chǎn)品有微軟的Kinect一代。
通過發(fā)射特定圖形的散斑或者點陣的激光紅外圖案,當(dāng)被測物體反射這些圖案,通過攝像頭捕捉到這些反射回來的圖案,計算上面散斑或者點的大小,跟原始散斑或者點的尺寸做對比,從而測算出被測物體到攝像頭之間的距離。
目前是業(yè)界比較成熟的深度檢測方案,很多的激光雷達和3D掃描技術(shù)都是采用的結(jié)構(gòu)光方案。
不過由于以折射光的落點位移來計算位置,這種技術(shù)不能計算出精確的深度信息,對識別的距離也有嚴(yán)格的要求。而且容易受到環(huán)境光線的干擾,強光下不適合,響應(yīng)也比較慢。
典型的結(jié)構(gòu)光方案包括:PrimeSense(微軟Kinect1代)、英特爾RealSense(前置方案)。
光飛行時間(TIme of Flight)
TOF系統(tǒng)是一種光雷達(LIDAR) 系統(tǒng),可從發(fā)射極向?qū)ο蟀l(fā)射光脈沖,接收器則可通過計算光脈沖從發(fā)射器到對象,再以像素格式返回到接收器的運行時間來確定被測量對象的距離。
TOF系統(tǒng)可同時獲得整個場景,確定3D范圍影像。利用測量得到的對象坐標(biāo)可創(chuàng)建3D影像,并可用于機器人、制造、醫(yī)療技術(shù)以及數(shù)碼攝影等領(lǐng)域的設(shè)備控制。

TOF方案的優(yōu)點在于響應(yīng)速度快,深度信息精度高,不容易受環(huán)境光線干擾,這些優(yōu)點使其成為移動端手勢識別最被看好的方案。代表廠商有微軟(Kinect2代)、意法半導(dǎo)體、英飛凌、德州儀器等。
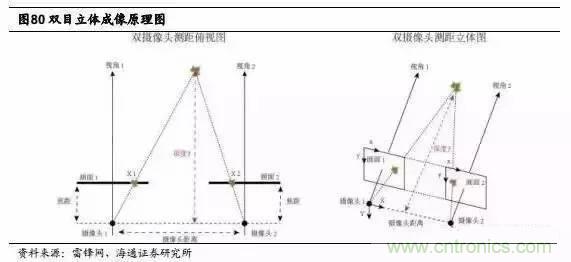
多角立體成像(MulTI-camera)
現(xiàn)在手勢識別領(lǐng)域的佼佼者Leap MoTion使用的就是這種技術(shù)。它使用兩個或者兩個以上的攝像頭同時采集圖像,通過比對這些不同攝像頭在同一時刻獲得的圖像的差別,使用算法來計算深度信息,從而多角三維成像。
Leap MoTion方案使用2個攝像機獲得左右立體影像,該影像有些輕微偏移,與人眼同序。計算機通過比較這兩個影像,就可獲得對應(yīng)于影像中物體位移的不同影像。該不同影像或地圖可以是彩色的,也可以為灰階,具體取決于特定系統(tǒng)的需求。
雙目多角立體成像方案的優(yōu)點在于不容易受到環(huán)境光線的干擾,適合室外環(huán)境,滿足7*24小時的長時間工作要求,不易損壞。缺點是昏暗環(huán)境、特征不明顯時不適合,目前應(yīng)用在智能安防監(jiān)控、機器人視覺、物流檢測等領(lǐng)域。

3)典型3D視覺硬件拆解與分析
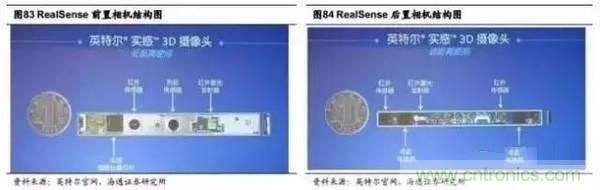
英特爾RealSense(結(jié)構(gòu)光+雙目立體成像)
RealSense前置實感 3D 攝像頭和 Kinect 1代原理一樣,它的工作原理是“結(jié)構(gòu)光”。主動發(fā)出特定圖案的紅外光,紅外光遇到環(huán)境中的各種障礙物發(fā)生折射,然后由設(shè)備上的攝像頭接收這些折射光,并通過芯片進行實時計算分析,計算出所處的空間位置。
RealSense遠距離的3D攝像頭,英特爾使用“雙目主動立體成像原理”,需要兩顆紅外傳感器。它模仿了人眼的“視差”原理,通過打出一束紅外光,以左紅外傳感器和右紅外傳感器追蹤這束光的位置,然后用三角定位原理來計算出 3D 圖像中的“深度”信息。
根據(jù)國外科技媒體Chipworks對應(yīng)用在聯(lián)想電腦Yoga15上的RealSense前置相機的拆解,采用結(jié)構(gòu)光原理,與微軟Kinect1代和蘋果PrimeSense原理類似,由紅外激光器發(fā)射出紅外光,經(jīng)過物體的反射,被紅外探測器所接收,反射光圖案的位置取決于反射物體的距離,通過分析反射圖案的幾何形狀,重建一個三維(3D)的場景。

微軟Kinect 2代(TOF方案)
2013年5月,微軟發(fā)布了基于TOF原理的Kinect2代(Kinectone)設(shè)備,替代了1代的“結(jié)構(gòu)光”的測算方法,使新Kinect2代比原始Kinect1代更快、更準(zhǔn)確。
Kinect2代采用了1080p視頻傳感器,提高了深度傳感器所能支持的最大分辨率來允許捕捉更多的細節(jié),如手指動作和肢體定位。Kinect2代每秒數(shù)據(jù)處理量可達2GB,采用了USB3.0的接口,動作輸入延遲僅為66毫秒。

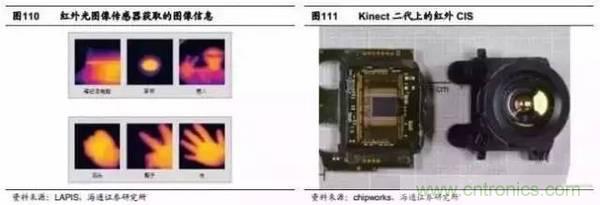
根據(jù)chipworks對Kinect One的拆解,主要核心部件為三顆紅外激光二極管、一顆紅外光圖像傳感器、一顆可見光圖像傳感器和一顆圖像處理主芯片。
主要工作原理為,紅外激光二極管以正弦信號的形式發(fā)射近紅外激光,光碰到環(huán)境中的物體發(fā)生反射,紅外光圖像傳感器采集反射光,計算反射信號與發(fā)射信號的時間差,從而得知位置距離信息,采用三顆紅外激光二極管的原因在于提供空間自由度更大的探測,可見光相機的作用是獲取環(huán)境實時的XY平面物體信息。
4.移動端3D視覺產(chǎn)業(yè)鏈分析
1)移動端3D視覺硬件與產(chǎn)業(yè)鏈結(jié)構(gòu)
目前在移動端3D視覺方面,三種主流的方案(結(jié)構(gòu)光、TOF時間光、雙目立體成像)中,已經(jīng)比較成熟的是結(jié)構(gòu)光和TOF時間光。
其中結(jié)構(gòu)光方案最為成熟,已經(jīng)大規(guī)模應(yīng)用于工業(yè)3D視覺領(lǐng)域,但是極易受到外界光的干擾、響應(yīng)速度較慢、識別精度較低,而TOF方案在這幾個方面均比結(jié)構(gòu)光方案具有一定的優(yōu)勢,因此TOF成為了目前在移動端被看好的方案。
雙目立體成像方案抗環(huán)境光干擾強,分辨率高,也是移動端可選方案之一,但是技術(shù)較新不夠成熟,目前在機器人、自動駕駛領(lǐng)域應(yīng)用較多。
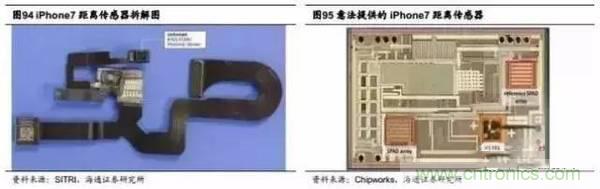
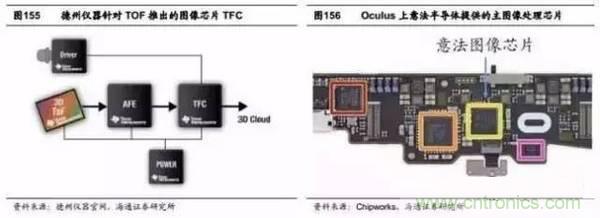
蘋果公司在2017年的iPhone7中使用了意法半導(dǎo)體提供的基于TOF原理的前置距離傳感器(proximity sensor)。
而在此之前,蘋果的iPhone5和iPhone6s采用的都是Heptagon提供的LED+光探測器的方案,從LED+光探測器到TOF,表明移動端TOF方案在技術(shù)方面已經(jīng)獲得了巨大的進步。
通過Chipworks網(wǎng)站的拆解,可以看到意法為iPhone7提供的基于TOF原理的距離傳感器,主要包括一個VCSEL發(fā)射器和兩個SPAD(單光子雪崩二極管)探測器,被整合于一般的CMOS工藝中。
TOF時間光相比于結(jié)構(gòu)光更加適合應(yīng)用到智能手機上,采用TOF原理來實現(xiàn)動作追蹤和深度感知已經(jīng)出現(xiàn)在谷歌的Project Tango方案中,主要用于空間三維數(shù)據(jù)的采集,與應(yīng)用于手勢/臉部識別是非常接近的。
在景深傳感器方面,采用的是TOF原理,使用的是英飛凌和PMD合作開發(fā)的技術(shù)方案。
根據(jù)日本Nomura公司的分析報告,聯(lián)想Phab2 Pro在紅外發(fā)射方面采用的是Princeton Optronics設(shè)計的VCSEL(垂直腔面發(fā)射器),由臺灣宏捷科(AWSC)提供代工;在紅外接收方面,英飛凌負責(zé)提供紅外CIS芯片,PMD提供飛時測距(TOF)形成景深數(shù)據(jù)部分;整個TOF模塊由中國舜宇光學(xué)提供封裝。
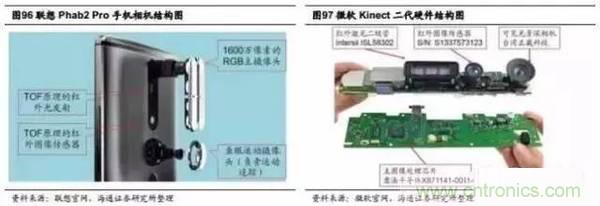
通過詳細分析微軟Kinect二代(TOF原理),可以看到TOF方案的主要硬件結(jié)構(gòu)為:紅外光發(fā)射器(IR LD)、紅外光圖像傳感器(IR CIS)、可見光圖像傳感器(Vis CIS)、圖像處理芯片,硬件結(jié)構(gòu)與聯(lián)想Phab2 Pro相機是非常類似的。
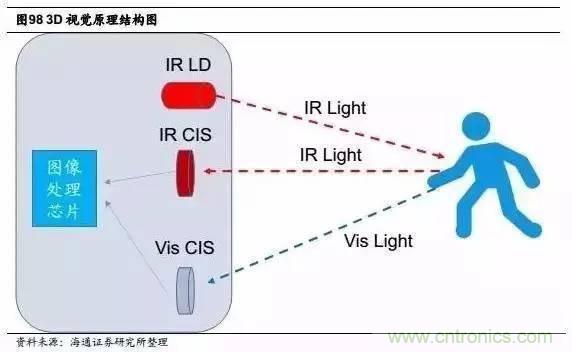
整個三維視覺系統(tǒng)的工作原理為:首先紅外激光發(fā)射器(IR LD)發(fā)射出近紅外光(IR Light),經(jīng)過人手或人臉的反射之后,被紅外圖像傳感器(IR CIS)所接收,這個圖像信息用來計算人手所處的位置(Z軸);
同時,可見光圖像傳感器采集二維平面(X與Y軸)的人手信息(Vis Light);兩顆圖像傳感器的信息匯總至專用的圖像處理芯片,從而得到人手或人臉的三維數(shù)據(jù),實現(xiàn)空間定位。
TOF與結(jié)構(gòu)光的區(qū)別在于對紅外光的使用方式不同,TOF通過計算紅外光發(fā)出光線與返回光線之間的向位移變化換算為位置信息,而結(jié)構(gòu)光依靠向物體投射一系列光線圖案組合,然后通過檢測光線的邊緣來測量距離,二者的硬件結(jié)構(gòu)是類似的。
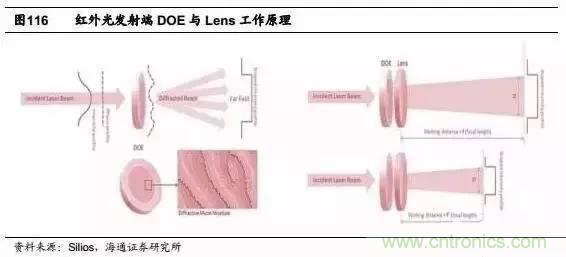
二者比較明顯的區(qū)別在于,在紅外光發(fā)射端,結(jié)構(gòu)光由于需要形成特定的光學(xué)圖案,所以需要添加特制的DOE(衍射光柵)和Lens(光學(xué)棱鏡)。

2)硬件層面:VCSEL與紅外CIS攝像頭成為市場新增量
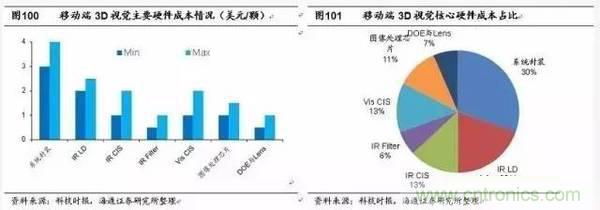
根據(jù)中國臺灣科技時報的統(tǒng)計數(shù)據(jù),對于移動端3D視覺而言,紅外光發(fā)射器的成本在2-2.5美元/顆,是占比最高的單顆元器件;圖像處理芯片,為1-1.5美元/顆;紅外CIS與可見CIS的價格接近,為1-2美元/顆,在紅外CIS上還需要添加高質(zhì)量的紅外濾色片(IR Fliter),價格為0.5-1美元/顆。整個系統(tǒng)模組的封裝成本為3-4美元/顆。
紅外光發(fā)射器
紅外主要波長是700nm-2500nm。目前的攝像頭圖像傳感器對900nm以上的紅外光感應(yīng)差,需要更強的光才能感測到,這就要求紅外發(fā)射器有更大的電流,更多的功耗。
而800nm以下的波長,太靠近可見光,極其容易受到太陽光的干擾,所以一般紅外的波長在800nm-900nm。目前,可以提供800-900nm波段的光源主要有三種:紅外LED、紅外LD(激光二極管)和VCSEL(垂直腔面發(fā)射激光器)。

三星Note7和富士通ARROWS NXF-04G手機中搭載的虹膜識別功能,采用的就是紅外LED作為發(fā)光光源,波長為810nm,歐司朗提供。
虹膜識別采用紅外LED的重要原因是LED可提供大角度散射光,消費者在使用時位置即使眼睛位置有所偏差,虹膜也可以被照射到。
但是紅外LED不適合移動端3D視覺,尤其是集成到手機上的話,因為其光線指向性差、功耗大、響應(yīng)速度較慢。
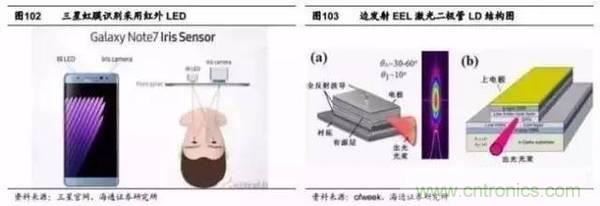
紅外激光二極管是指可在一個頻率上產(chǎn)生相干紅外光束的半導(dǎo)體二極管,通常是由砷化鎵或摻雜有銦和鋁之類其他材料的砷化鎵制成。
與LED相比,具有激光的定向性好、高亮度特點,比較常見的是LD-DFB規(guī)格(以FP腔為諧振腔,發(fā)出多縱模相干光),為邊發(fā)射模式(簡稱EEL)。在激光通信、光存儲、光陀螺、激光打印、測距以及雷達等方面以及獲得了廣泛的應(yīng)用。
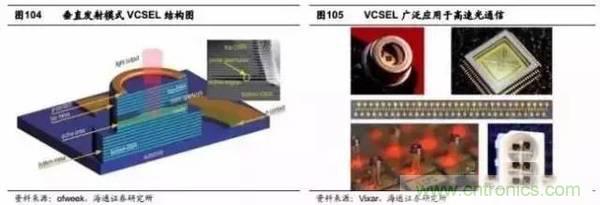
VCSEL可以說是紅外激光LD的一種,全名為垂直共振腔表面放射激光,顧名思義,它是可以垂直發(fā)射模式,與其他紅外LD的邊發(fā)射模式不同。
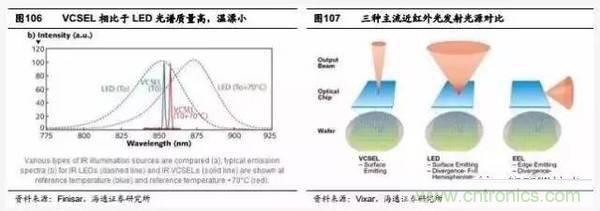
VCSEL的垂直結(jié)構(gòu)更加適合進行晶圓級制造和封測,規(guī)模量產(chǎn)之后的成本相比于邊發(fā)射LD有優(yōu)勢,可靠性高,沒有傳統(tǒng)的激光器結(jié)構(gòu)如暗線缺陷的失效模式。相比于LED,VCSEL的光譜質(zhì)量高,中心波長溫漂小,響應(yīng)速度快,優(yōu)勢明顯。
綜合分析三種方案,LED雖然成本低,但是發(fā)射光角度大,必須輸出更多的功率以克服損失。
此外,LED不能快速調(diào)制,限制了分辨率,需要增加閃光持續(xù)時間;邊發(fā)射LD也是手勢識別的可選方案,但是輸出功率固定,邊緣發(fā)射的模式在制造工藝方面兼容性不好。
VCSEL比LD-EEL的優(yōu)勢在于所需的驅(qū)動電壓和電流小,功耗低,光源可調(diào)變頻率更高(可達數(shù)GHz),與化合物半導(dǎo)體工藝兼容,適合大規(guī)模集成制造。尤其是VCSEL功耗低、可調(diào)頻率高的優(yōu)點,使其比LD-EEL更加適合消費電子智能終端。
VCSEL的制造依賴于MBE(分子束外延)或MOCVD(金屬有機物氣相沉積)工藝,在GaAs(80%左右的份額)或InP(15%左右的份額)晶圓上生長多層反射層與發(fā)射層。
典型的VCSEL結(jié)構(gòu)包括:激光腔(laser cavity),頂部和底部分布式布拉格反射器(DBR),電極等部分,其中激光腔的主要部分是量子阱(quantum wells)和光限制層(confinement structure)。
由于VCSEL主要采用三五族化合物半導(dǎo)體材料GaAs或InP(含有In、Al等摻雜),因此移動端VCSEL產(chǎn)業(yè)鏈與化合物半導(dǎo)體產(chǎn)業(yè)鏈結(jié)構(gòu)類似。
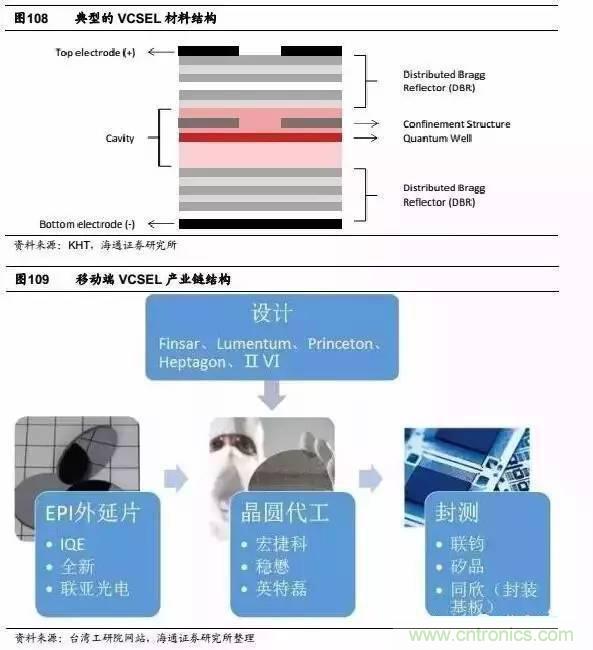
目前,全球范圍內(nèi)主要的設(shè)計者包括Finsar、Lumentum、Princeton Optronics、Heptagon、ⅡⅥ等公司,它們在移動端VCSEL處于前沿的研發(fā)角色。
由IQE、全新、聯(lián)亞光電等公司提供三五族化合物EPI外延硅片,然后由宏捷科(Princeton Optronics合作方)、穩(wěn)懋(Heptagon合作方)等公司進行晶圓制造,再經(jīng)過聯(lián)鈞、矽品等公司的封測,便變成了獨立的VCSEL器件。
然后由設(shè)計公司提供給意法半導(dǎo)體、德州儀器、英飛凌等綜合解決方案商,再提供給下游消費電子廠商。
紅外光圖像傳感器
紅外CMOS圖像傳感器(IR CIS)用來接收被手部或臉部反射的紅外光,這是一個比較成熟的器件。
在搭載虹膜識別功能的三星Note7和富士通ARROWS NX F-04G手機中均出現(xiàn)IR CIS,其中三星的紅外CIS中傳感芯片由三星自家提供,鏡頭來自于韓國廠商Kolen,模組由韓國廠商Patron制造。
目前來看,紅外CIS供應(yīng)商主要包括意法半導(dǎo)體、奇景光電、三星電子、富士通等公司。
相比于可見光CIS,紅外CIS還是一個比較小的市場,但是增速很快,隨著熱成像、汽車夜視、安防監(jiān)控、手勢識別、虹膜識別等的普及,紅外CIS出貨量有望快速增長。
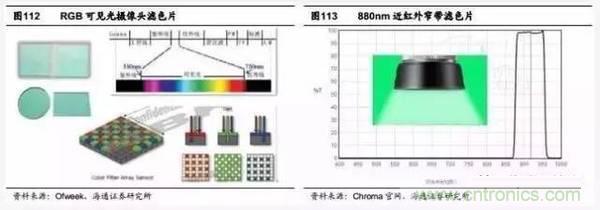
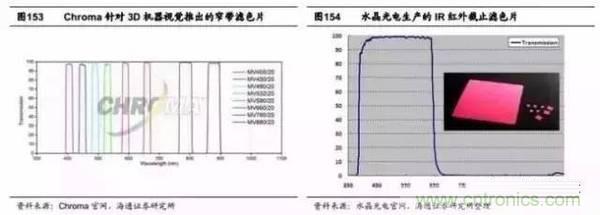
對于3D視覺而言,IR紅外攝像頭與RGB可見光攝像頭在濾色片方面存在較大的差異。傳統(tǒng)的RGB可見光攝像頭,需要采用高通紅外濾色片,將不必要的低頻近紅外光過濾掉,以免紅外光線對可見光部分造成影響,產(chǎn)生偽色或波紋,同時可以提高有效分辨率和彩色還原性。
但是紅外攝像頭,為了不受到環(huán)境光線的干擾,需要使用窄帶濾色片,只允許特定波段的近紅外光通過,目前近紅外窄帶濾色片主要采用干涉原理,需要幾十層光學(xué)鍍膜構(gòu)成,相比于RGB吸收型濾色片具有更高的技術(shù)難度和產(chǎn)品價格。
目前,近紅外窄帶濾色片主要廠商包括VIAVI、水晶光電等。
可見光圖像傳感器
可見光圖像傳感器(Vis CIS)是非常成熟的商業(yè)化產(chǎn)品,隨著智能手機拍照功能的不斷完善,可見光CIS的分辨率越來越高、功耗越來越小、技術(shù)也越來越先進。
圖像處理芯片
圖像處理芯片需要將紅外光CIS采集的位置信息與可見光CIS采集的物體平面信息處理成單像素含有深度信息的三維圖像。
該芯片具有一定的技術(shù)壁壘,對于算法層面的要求較高,目前全球范圍內(nèi)可以提供該類產(chǎn)品的公司為少數(shù)幾家芯片巨頭,包括意法半導(dǎo)體、德州儀器、英飛凌和恩智浦(已被高通收購)等。
紅外光發(fā)射端DOE與Lens
對于結(jié)構(gòu)光方案而言,在紅外光發(fā)射端必須配有DOE(衍射光柵)和Lens(光學(xué)棱鏡),因為結(jié)構(gòu)光需要以線條等圖案的形式發(fā)射紅外光,這需要特定的光柵和光學(xué)棱鏡的參與才能夠?qū)崿F(xiàn)。
3)算法與軟件層面:AI人工智能將成為提升精度的重要因素
隨著AI人工智能技術(shù)的大幅進步,人工智能方案已經(jīng)在語音識別、語義理解、圖片識別等領(lǐng)域取得成功,在物體識別、人臉識別方面也取得了長足的進步,3D視覺在算法方面與人工智能結(jié)合,將實現(xiàn)識別精度的大幅提升,對于更加復(fù)雜的手部動作/面部表情可以進行更加深刻的理解和分析,這將極大促進3D視覺的推廣和實用價值。
5.國內(nèi)外產(chǎn)業(yè)鏈相關(guān)公司分析
在主流的三種技術(shù)方案中,TOF方案響應(yīng)速度快,深度信息精度高,識別距離范圍大,不易受環(huán)境光線干擾,因此是移動端3D視覺比較可行的方案;結(jié)構(gòu)光方案由于技術(shù)較為成熟,工業(yè)化產(chǎn)品較多,也被部分廠商所采用;雙目立體成像是比較新的技術(shù),參與的廠商較少,更適合室外強光條件和高分辨率應(yīng)用,目前主要應(yīng)用在機器人視覺、自動駕駛等方面。
1)綜合技術(shù)方案提供商
目前,在深度相機綜合技術(shù)方案方面,國外參與的公司眾多,既有微軟、英特爾等巨頭,也有德州儀器、意法半導(dǎo)體、英飛凌、AMS(Heptagon)等芯片巨頭,還包括SoftKinetic(索尼收購)、PrimeSense(蘋果收購)、LeapMotion等明星創(chuàng)業(yè)型公司。
目前,國內(nèi)從事深度攝像頭綜合技術(shù)方案的主要公司包括:TOF方案——舜宇光學(xué)、??低?、深圳樂行天下,結(jié)構(gòu)光方案——深圳奧比中光、南京華捷艾米,雙目立體成像方案——上海圖漾科技。


2)系統(tǒng)模組封裝與集成供應(yīng)商
由于3D視覺方案涉及較多的硬件部分,需要紅外發(fā)射端、紅外接收攝像頭、可見光攝像頭、圖像處理芯片四大部分的協(xié)同合作,紅外光的發(fā)射與接收之間的匹配對整個3D視覺方案的準(zhǔn)確度和響應(yīng)速度至關(guān)重要,因此整個系統(tǒng)模組的封裝和集成是非常關(guān)鍵的。
在聯(lián)想Phab2 Pro手機中,3D深度相機的模組封裝與集成由舜宇光學(xué)完成。除了舜宇光學(xué)之外,具備移動端3D方案模組封裝的廠商還包括歐菲光、LG Innotek、Sharp等。

3)紅外光發(fā)射器-VCSEL
由于VCSEL在高端短距離光通訊領(lǐng)域應(yīng)用廣泛,因此國內(nèi)光通訊器件龍頭光迅科技在VCSEL方面已經(jīng)有商業(yè)化產(chǎn)品推出。但是,致力于移動端VCSEL設(shè)計的公司主要包括Finsar、Lumentum、PrincetonOptronics、Heptagon、ⅡⅥ等國外公司,國內(nèi)公司涉及較少。

中科院長春光機所在VCSEL科研領(lǐng)域處于世界前沿地位,2014年5月長春光機所在國內(nèi)首次研制出堿金屬原子光學(xué)傳感技術(shù)專用的795nm和894nm 垂直腔面發(fā)射激光器(VCSEL)??勺鳛楹诵墓庠从糜谛酒壴隅?、原子磁力計、原子陀螺儀等堿金屬原子傳感器。
VCSEL主要基于三五族化合物砷化鎵制造而成,目前在VCSEL和制造和封測方面,目前主要是臺灣化合物半導(dǎo)體廠商參與,包括外延片提供商IQE(英國)、全新、聯(lián)亞光電,晶圓代工宏捷科、穩(wěn)懋,封測廠聯(lián)鈞、矽品等。
國內(nèi)方面,三安光電在化合物半導(dǎo)體外延生長和晶圓制造領(lǐng)域發(fā)展迅速,具備較強的實力,公司在國家大基金的支持下建設(shè)年產(chǎn)30萬片GaAs和6萬片GaN的6寸生產(chǎn)線,建設(shè)進程順利。
4)紅外與可見CIS攝像頭
紅外CMOS圖像傳感器(IR CIS)用來接收被手部反射的紅外光,這是一個比較成熟的芯片。
紅外CIS供應(yīng)商主要包括意法半導(dǎo)體、奇景光電、三星電子、富士通等公司。相比于可見光CIS,紅外CIS還是一個比較小的市場,但是增速很快,隨著熱成像、汽車、監(jiān)控、手勢識別、虹膜識別等的普及,紅外CIS出貨量有望快速增長。
中國大陸目前已經(jīng)在攝像頭方面形成了完善的產(chǎn)業(yè)鏈結(jié)構(gòu),在CIS芯片方面有北京君正(OV)、格科微電子、比亞迪電子等公司,在光學(xué)透鏡方面有舜宇光學(xué)、聯(lián)創(chuàng)電子等,在模組制造方面有歐菲光、舜宇光學(xué)、丘鈦科技等公司。
根據(jù)前文我們的分析,對于3D視覺而言,IR紅外攝像頭與RGB可見光攝像頭在濾色片方面存在較大的差異。紅外攝像頭為了不受到環(huán)境光線的干擾,需要使用窄帶濾色片,只允許特定波段的近紅外光通過。目前,近紅外窄帶濾色片主要廠商包括VIAVI、水晶光電等。
5)圖像處理芯片
該芯片具有一定的技術(shù)壁壘,對于算法層面的要求較高,目前全球范圍內(nèi)可以提供該類產(chǎn)品的公司為少數(shù)幾家芯片巨頭,包括意法半導(dǎo)體、德州儀器、英飛凌、恩智浦、安霸,以及索尼、東芝、富士通等日本芯片巨頭。
在圖像處理芯片方面,國內(nèi)公司全志科技、北京君正和瑞芯微具備一定的實力,尤其是在幾年前平板電腦爆發(fā)時得到了快速成長。

6)國內(nèi)產(chǎn)業(yè)鏈?zhǔn)芤婀緟R總
經(jīng)過我們前文的分析,移動端3D視覺作為一個嶄新的技術(shù),已經(jīng)出現(xiàn)在微軟Kinect、英特爾RealSense等產(chǎn)品中,隨著硬件端技術(shù)的不斷進步,算法與軟件層面的不斷優(yōu)化,3D視覺的精度和實用性不斷得到提升,尤其是TOF方案與VCSEL的快速成熟,使得“深度相機+手勢/面部識別”具備了大規(guī)模進入移動智能終端的基礎(chǔ)。
分析整個產(chǎn)業(yè)鏈的結(jié)構(gòu),無論是結(jié)構(gòu)光方案、TOF方案,還是雙目立體成像方案,主要可以劃分為:綜合技術(shù)方案提供商、算法與軟件商、硬件供應(yīng)商三部分,其中硬件又可以劃分為四大元器件(紅外發(fā)射器、紅外CIS攝像頭、可見光CIS攝像頭、圖像處理芯片,另外紅外攝像頭需要特制的窄帶濾色片,結(jié)構(gòu)光方案需要發(fā)射端光學(xué)棱鏡與DOE光柵,雙目立體成像方案多一顆紅外CIS攝像頭)。
綜合技術(shù)方案提供商
國內(nèi)從事深度攝像頭綜合技術(shù)方案的主要公司包括:TOF方案——舜宇光學(xué)(2382.HK)、深圳樂行天下,結(jié)構(gòu)光方案——深圳奧比中光、南京華捷艾米,雙目立體成像方案——上海圖漾科技。
系統(tǒng)模組封裝與集成供應(yīng)商
在聯(lián)想Phab2 Pro手機中,3D深度相機的模組封裝與集成由舜宇光學(xué)完成。歐菲光、丘鈦科技等相機模組制造商,由于在相機模組制造方面積累了豐富的經(jīng)驗,具備發(fā)展相應(yīng)技術(shù)的潛力。
算法與軟件商
目前,算法方面還沒有成為獨立的一環(huán),因為大部分綜合技術(shù)方案供應(yīng)商已經(jīng)在算法層面進行優(yōu)化,目標(biāo)是為客戶提供硬件+算法一體化的方案。
硬件供應(yīng)商
紅外發(fā)射器
國內(nèi)在VCSEL方面起步較晚,在設(shè)計方面還不具有有競爭力的公司,長春光機所在VCSEL科研領(lǐng)域處于世界先進水平;光迅科技曾開發(fā)出光通信使用的VCSEL芯片。由于VCSEL主要材料為GaAs(摻雜In、Al等),在工藝方面與化合物半導(dǎo)體類似,在化合物晶圓制造方面,三安光電具有較強的實力。
紅外與可見光CIS
中國大陸目前已經(jīng)在攝像頭方面形成了完善的產(chǎn)業(yè)鏈結(jié)構(gòu),在CIS芯片方面有北京君正(擬收購OV和思必科)、格科微電子、比亞迪電子等公司,在光學(xué)透鏡方面有舜宇光學(xué)、聯(lián)創(chuàng)電子,在模組制造方面有歐菲光、舜宇光學(xué)、丘鈦科技等公司。
3D視覺方案需要克服環(huán)境光線的干擾,因此在紅外CIS上需要添加窄帶濾色片,國內(nèi)公司水晶光電具有深厚的技術(shù)基礎(chǔ)和較高的國際知名度,有望受益。
圖像處理芯片
在圖像處理芯片方面,國內(nèi)公司全志科技、北京君正和瑞芯微具備一定的實力,尤其是在幾年前平板電腦爆發(fā)時得到了快速成長。
結(jié)構(gòu)光DOE與Lens
對于結(jié)構(gòu)光方案而言,需要通過衍射光柵DOE和光學(xué)棱鏡Lens,獲得特定形狀的光斑,一般采用MEMS工藝制造加工。
推薦閱讀:



