
【導(dǎo)讀】無人機的飛行感知技術(shù)主要用作兩個用途,其一是提供給飛行控制系統(tǒng),由于飛行控制系統(tǒng)的主要功能是控制飛機達(dá)到期望姿態(tài)和空間位置,所以這部分的感知技術(shù)主要測量飛機運動狀態(tài)相關(guān)的物理量,涉及的模塊包括陀螺儀、加速度計、磁羅盤、氣壓計、GNSS模塊以及光流模塊等。另一個用途是提供給無人機的自主導(dǎo)航系統(tǒng),也就是路徑和避障規(guī)劃系統(tǒng),所以需要感知周圍環(huán)境狀態(tài),比如障礙物的位置,相關(guān)的模塊包括測距模塊以及物體檢測、追蹤模塊等。
機體運動狀態(tài)感知
陀螺儀
目前商用無人機普遍使用的是MEMS技術(shù)的陀螺儀,因為它的體積小,價格便宜,可以封裝為IC的形式。MEMS式陀螺儀常用來測量機體繞自身軸旋轉(zhuǎn)的角速率,常用的型號有6050A(Invensense),ADXRS290(ADI),衡量陀螺儀性能的指標(biāo)包括測量范圍(量程)、靈敏度、穩(wěn)定性(漂移)以及信噪比等。
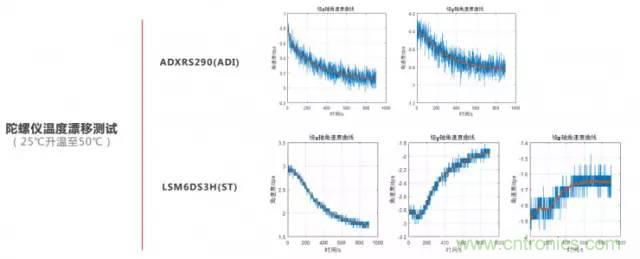
上面是一個陀螺儀溫度漂移測試結(jié)果圖,測試的環(huán)境是從25℃升溫至50℃,整個過程保持陀螺儀靜止不動,陀螺儀的準(zhǔn)確輸出應(yīng)該是一個固定的數(shù)值。但從結(jié)果來看,兩款傳感器的實際輸出都受到溫度變化影響。相比而言,ADXRS290(ADI)的輸出數(shù)值變化幅度較小,基本上在0.5左右。
加速度計
加速度計測量的是機體運動的線加速度,但由于地球引力,測量值中還會包含重力加速度分量,在某些使用情況下需要把這部分減去。常用的MEMS加速度計傳感器型號有6050A(Invensense)和ADXL350(ADI)。部分傳感器生產(chǎn)商為了提高芯片集成度,會將陀螺儀和加速度計封裝在一起,稱為六軸傳感器,例如6050A(Invensense)。
磁羅盤
磁羅盤測量的物理量是地球磁場強度沿機體軸的分量,并依此計算出機體的航向角。常用的MEMS磁羅盤傳感器型號有HMC5983L(Honeywell)和QMC5883L(矽睿),兩者性能相近,其中前者目前已經(jīng)停產(chǎn)。磁羅盤主要的性能參數(shù)包括靈敏度、穩(wěn)定性(漂移)等。
氣壓計
氣壓計測量的物理量是大氣壓值,根據(jù)該數(shù)值可計算出絕對海拔高度。常用的氣壓計傳感器型號包括MS5611(MEAS)、MS5607(MEAS)以及BMP180(Bosch)。氣壓計在使用過程中存在的問題是,在近地面飛行時,“地面效應(yīng)”的存在會導(dǎo)致飛機周圍氣體的氣壓分布與靜止?fàn)顟B(tài)下的大氣不同,使得無法用氣壓計來測算出高度。通常的解決辦法是在起飛或降落時使用其他傳感器,比如超聲波傳感器或激光測距儀。
GNSS模塊
GNSS模塊測量的物理量相對比較豐富,主要包括地理坐標(biāo)(經(jīng)緯度)、海拔高度、線速度以及航向角(RTK系統(tǒng))。常用的GNSS模塊生產(chǎn)商包括瑞士的U-BLOX和加拿大的NOVATEL。在使用GNSS模塊時,衛(wèi)星信號接收天線的放置需要要注意電磁干擾的屏蔽,部分有實力的整機生產(chǎn)廠商會根據(jù)飛機型號專門定制衛(wèi)星信號接收天線。
光流模塊
光流模塊是一個比較特殊的模塊,既可以用來感知機體的運動狀態(tài),如測量水平方向的位移速度,也可以用來感知周圍的環(huán)境,用作避障的用途。比較常見的光流模塊是開源的PX4FLOW。光流模塊通常在室內(nèi)使用,主要是為了解決室內(nèi)衛(wèi)星信號不佳的問題,另外對于拍攝的地面需要有一定紋理圖案。
周圍環(huán)境狀態(tài)感知
測距模塊
這里列舉五個常用的測距模塊:超聲波、紅外TOF、激光、毫米波雷達(dá)、深度感知攝像頭。

超聲波和紅外TOF各方面性能比較相似,比如測量距離都比較近,像超聲波測量的距離一般在4米左右。另外這兩種傳感器的使用范圍都容易受到實際環(huán)境的限制,比如紅外TOF是向被測物體表面發(fā)射紅光并反射,如果遇到紅光反射率不高的物體像玻璃就會失效。但這兩種傳感器有一個最大的優(yōu)勢就是成本低,另外模塊體積也比較小,所以在消費類無人機上得到了廣泛使用。
激光雷達(dá)測距一般都比較遠(yuǎn),大多數(shù)產(chǎn)品都可以達(dá)到100米以上,但是大雨大霧的天氣環(huán)境會影響其測量結(jié)果。另外的劣勢在于成本比較高: 在激光雷達(dá)行業(yè)實力最強的是Velodyne,它的一款適用于無人機使用的小型化產(chǎn)品VLP-16價格也達(dá)到了1000美元以上,對于商用無人機來說成本還是比較高。
深度感知攝像頭根據(jù)測量技術(shù)可以分為三種,立體攝像頭,也叫雙目視覺技術(shù),代表產(chǎn)品就是大疆的精靈4;結(jié)構(gòu)光技術(shù),代表產(chǎn)品有微軟的Kinect;時差測距技術(shù)(TOF),由于生產(chǎn)廠家較少而且成本較高,因此在無人機上的應(yīng)用很少。深度感知攝像頭在使用時也存在局限性,雙目視覺技術(shù)的缺點是在低光環(huán)境下無法正常工作,而結(jié)構(gòu)光技術(shù)則與之相反,在強光下無法正常工作。因此有的廠家把兩種技術(shù)進(jìn)行組合,彌補彼此的缺陷,擴大其適用的環(huán)境范圍。
提高測量精度的方法
傳感器校準(zhǔn)
傳感器校準(zhǔn),包括精校準(zhǔn)和粗校準(zhǔn)。精校準(zhǔn)效果比較好,但需要昂貴的標(biāo)定設(shè)備;粗校準(zhǔn)則不需要借助外部設(shè)備,只對傳感器本身進(jìn)行操作即可。
以磁羅盤的粗校準(zhǔn)為例,由于地球上任意位置的地磁場強度在較長時間跨度內(nèi)都可視為是恒定的,當(dāng)轉(zhuǎn)動磁羅盤時,根據(jù)相對運動可假設(shè)磁羅盤固定不動,而地磁場矢量隨之在轉(zhuǎn)動,其矢量端點在空間的軌跡應(yīng)為一個標(biāo)準(zhǔn)的球體,但由于傳感器存在誤差,實際測出的數(shù)據(jù)并不嚴(yán)格都在球體的表面,這時候就需要根據(jù)測量出來的數(shù)值以及已知的準(zhǔn)確值來計算兩者之間的換算關(guān)系,也就是該款磁羅盤的誤差模型。在以后使用該款磁羅盤時就可以根據(jù)粗校準(zhǔn)得出的誤差模型來處理測量值,使得測量值的誤差減小。
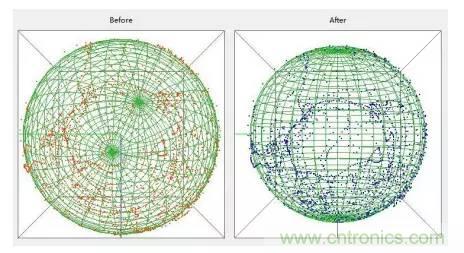
磁羅盤校準(zhǔn)(SGB sbgcenter)
多種傳感器數(shù)據(jù)融合
不同類型的傳感器數(shù)據(jù)融合方法有多種,在業(yè)內(nèi)用的比較普遍而且效果也比較好的是EKF,也就是擴展卡爾曼濾波。
以計算飛機姿態(tài)角的融合方法為例,EKF更新過程主要分為兩個部分,預(yù)測更新和量測更新。預(yù)測更新主要利用陀螺儀更新預(yù)測狀態(tài)量,同時計算該狀態(tài)量的協(xié)方差矩陣。在量測更新中先會計算濾波增益,然后使用濾波增益融合預(yù)測狀態(tài)量、加速度計以及磁羅盤的數(shù)據(jù),成為一個融合狀態(tài)量,同時計算融合狀態(tài)量的協(xié)方差矩陣,在下一次更新周期的計算中使用。
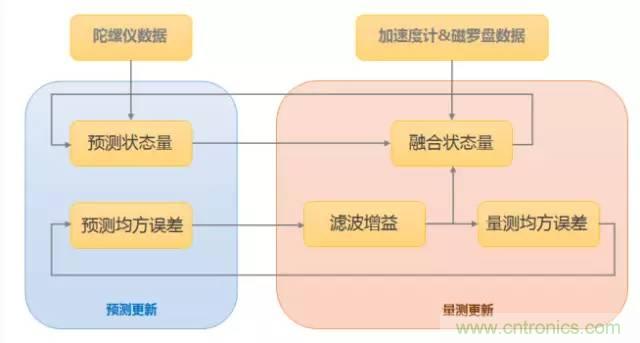
計算姿態(tài)角的融合方法流程
傳感器冗余設(shè)計
傳感器冗余設(shè)計主要是將多個同種傳感器進(jìn)行組合,處理方法是首先會剔除數(shù)據(jù)異常的傳感器,然后再進(jìn)行傳感器的融合。冗余設(shè)計不僅可以提高測量精度也可以提高整套系統(tǒng)的可靠性,在某一個傳感器失效的情況發(fā)生時,讓整個系統(tǒng)能夠繼續(xù)正常工作。
(本文內(nèi)容由領(lǐng)航高科(LHUAS)研發(fā)部工程師周鵬躍分享,新智造整理)
推薦閱讀


