
【導讀】MEMS傳感器包括加速度計(ACC)、陀螺儀(GYRO)、磁力計(MAG)、壓力傳感器(PS)和話筒(MIC)。因為低成本,小尺寸,低功耗,高性能,MEMS傳感器近幾年來被集成到便攜設備內(nèi)。本文將論述MEMS傳感器在先進移動應用中的作用,例如,移動增強實境(MAR)、定位服務(LBS)和利用航位推算法確定方位的MEMS傳感器與GPS接收器整合解決方案。
快速的CPU、多任務處理的操作系統(tǒng)、高靈敏度GPS接收器、3G/4G無線通信芯片組、高分辨率數(shù)字攝像頭、觸摸屏LCD顯示屏和大容量存儲器是智能手機的共同特性。MEMS傳感器的用途不再局限于當前的應用領域,例如,屏幕旋轉、省電、運動檢測、數(shù)字羅盤和3D游戲。目前導航廠商正在開發(fā)更先進的MEMS傳感器應用,例如,增強實境(AR)、定位服務(LBS)、行人航位推算系統(tǒng)(PDR)。
1. 增強實境
增強實境(AR)不是一個新話題。根據(jù)定義,增強實境是在一個實時顯示的真實環(huán)境上疊加圖形、聲音和其它感知強化技術并使其具有互動性和可操縱性的功能或用戶界面。在一個真實環(huán)境內(nèi)融合3D虛擬信息有助于提高用戶對虛擬目標周圍環(huán)境的真實感。
最近增強實境技術出現(xiàn)了幾個成功的應用案例。例如,汽車安全設備把路況和汽車周圍情況的信息投射到前檔風玻璃上,讓駕駛員對汽車所在位置有一個全面了解。另一個應用示例是把智能手機對準一個方位已知的目標,例如飯店或超市,手機就會顯示所指目標的信息。此外,如果你身處一個陌生的大城市,這個功能還能幫助你找到最近的地鐵站,只要把手機旋轉360度,即可鎖定地鐵路線,沿所指方向到達目的地。
社交網(wǎng)絡在現(xiàn)代人的生活中扮演著重要作用。當一個人接近一個購物中心時,他可以用手機指向購物中心。然后,他的朋友將會收到經(jīng)過數(shù)字處理技術強化的他所在位置和周邊環(huán)境的虛擬信息。反之亦然,他也會收到他朋友的方位和周邊信息。因此,增強實境是一種改變?nèi)藗儗φ鎸嵤澜绲母杏X的新方式。
由于智能手機市場高速增長,移動設備開始興起增強實境應用。圖1所示是在智能手機內(nèi)實現(xiàn)移動增強實境所需的關鍵組件。
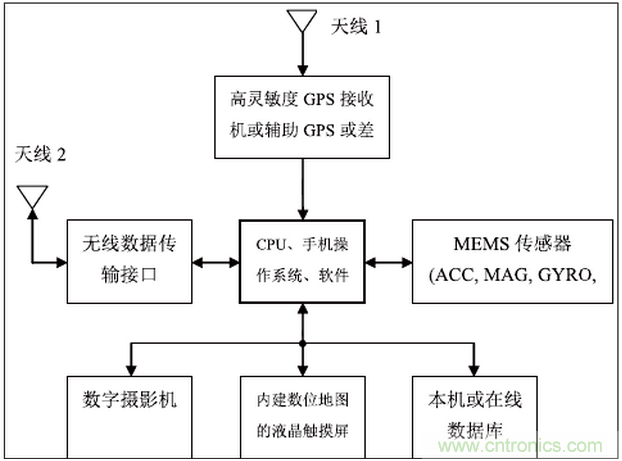
圖1:智能手機的移動增強實境系統(tǒng)結構
●數(shù)字攝像頭:用于傳送真實世界環(huán)境的信息流,并在液晶觸摸屏上顯示捕獲的視頻。目前新款智能手機上已配備500萬像素或更高分辨率的成像傳感器。
●CPU、手機操作系統(tǒng)、用戶界面和軟件開發(fā)工具:這些是智能手機的核心組件?,F(xiàn)在新的智能手機配備1GHz以上的雙核CPU、512MB RAM內(nèi)存和32GB存儲器。在應用開發(fā)過程中,用戶界面和軟件開發(fā)工具(SDK)讓開發(fā)人員輕松地調(diào)用應用程序接口,訪問圖形、無線通信功能、數(shù)據(jù)庫和MEMS傳感器原始數(shù)據(jù),無需知道這些代碼背后的詳細原理。
●高靈敏度GPS接收器或A-GPS或DGPS:當捕獲到有效的衛(wèi)星信號時,這些模塊用于確定用戶當前的經(jīng)緯度位置。多年來人們一直在研究提高GPS接收機在室內(nèi)和高樓林立的地區(qū)的接收靈敏度和定位精度,因為在這類地區(qū)衛(wèi)星信號變?nèi)?,并發(fā)生多信道干擾錯誤。
●無線數(shù)據(jù)傳輸接口,包括GSM/GPRS、WiFi、藍牙和RFID:無線數(shù)據(jù)接口的主要目的是接入互聯(lián)網(wǎng),檢索當前位置目標的在線數(shù)據(jù)庫,在等待GPS定位或沒有GPS信號時提供簡要的定位信息。如果建筑物內(nèi)預裝了發(fā)射器,其它的近距離無線連接如WLAN、藍牙和RFID也可以提供精度適當?shù)氖覂?nèi)定位信息。
●本機或在線數(shù)據(jù)庫:用于把增強的虛擬目標信息疊加到真實世界視頻上。當目標與當前方位吻合時,系統(tǒng)將能從本機數(shù)據(jù)庫或在線數(shù)據(jù)庫檢索目標的信息。然后用戶可以點擊觸摸屏上的超級鏈接或圖標,接收更加詳細的方位信息。
●內(nèi)置數(shù)字地圖的液晶觸摸屏:提供高分辨率的用戶界面,顯示含有虛擬目標信息的真實世界的視頻。有了數(shù)字地圖,用戶可以知道當前位置所在街道名稱,無需配戴任何特殊的3D眼鏡。
●MEMS傳感器(加速度計、磁力計、陀螺儀和壓力傳感器):這些傳感器是自導式組件,隨時隨地工作。因為低成本、小尺寸、輕量、低功耗、高性能,它們成為行人航位推算應用的首選半導體產(chǎn)品。這些傳感器與GPS接收器集成在一起可以在室內(nèi)外獲得方位信息。下面的內(nèi)容將探討這些傳感器在提高室內(nèi)導航精度中所扮演的重要角色。
隨時隨地獲取精確且可靠的方位信息,使虛擬目標與真實世界的環(huán)境保持一致,是移動增強實境應用面臨的主要挑戰(zhàn)。
2. 室內(nèi)方位檢測
盡管智能手機內(nèi)置一個GPS接收器,在戶外的定位功能非常不錯,在數(shù)字地圖上顯示航向,但是,某些GPS接收機在室內(nèi)或高樓林立的城區(qū)無法接收衛(wèi)星定位信號。即便在戶外,當汽車或行人靜止時,GPS也無法提供精確的方位或航向信息。GPS無法區(qū)分微小的高度變化。此外,GPS僅憑一個天線無法為手機或汽車用戶提供姿態(tài)信息,例如,俯仰/滾轉/航向信息。
差分全球定位系統(tǒng) (DGPS)能夠取得幾厘米的定位精度;但是需要另一個GPS接收器做基站,使用某一種距離粗捕獲碼向移動GPS接收器發(fā)射參考位置信息。輔助全球定位系統(tǒng) (A-GPS)在某種程度上有助于GPS獲得室內(nèi)定位信息,但是,無法在可以接受的間隔內(nèi)提供精確的定位信息。當手機用戶靜止時,至少需要三個GPS天線才可能讓GPS檢測到用戶的姿態(tài)信息。不過,目前在一個智能手機上安裝多個GPS天線還是行不通的。
因此,僅有GPS的智能手機不能為手機用戶提供精確的方位和姿態(tài)信息。自導式MEMS傳感器是協(xié)助GPS實現(xiàn)一體化導航系統(tǒng)、提供室內(nèi)外LBS定位服務的理想選擇。
當天線沒有被遮擋時,現(xiàn)代的GPS接收器的絕對定位精度是3米到20米,這個參數(shù)不會在一段時期后發(fā)生漂移?;贛EMS傳感器的捷聯(lián)式慣性導航系統(tǒng)(SINS) 可在很短的時間內(nèi)提供精確的定位信息,但是,根據(jù)運動傳感器的性能,這種導航系統(tǒng)在使用一段時間后很快就會發(fā)生精度漂移現(xiàn)象。行人航位推算系統(tǒng)(PDR)是一個根據(jù)步長和方位計算從室內(nèi)已知初始位置開始的行走距離的相對導航系統(tǒng),雖然定位精度不會隨時間推移而發(fā)生漂移,但是需要在受磁力干擾的環(huán)境內(nèi)保持航向精度,此外,GPS需要對步長進行校準,才能達到可以接受的定位精度。
按照捷聯(lián)式慣性導航系統(tǒng)(SINS)理論,根據(jù)內(nèi)在的偏差漂移和比例因數(shù),慣性傳感器(3軸加速度計和3軸陀螺儀)可分為三大類:導航級、戰(zhàn)術級和商用級。通過下面的兩個方程式,可以計算出獨立的加速度計和陀螺儀的水平位置誤差。
加速度計的位置誤差:
PE_ACC=1/2·ACC_bias·T2 (1)
其中:
ACC_bias … 加速度計長期偏差穩(wěn)定性,單位:mg;g = 9.81m/s2
T … 雙重積分周期,單位:秒
PE_ACC … ACC_bias造成的位置誤差;單位:米。
陀螺儀的位置誤差:
PE_GYRO=1/6·g·GYRO_bias·T3 (2)
其中:
g … 地球重力,9.81m/s2
GYRO_bias … 陀螺儀長期偏差穩(wěn)定性,單位:rad/s
T … 雙重積分周期,單位:秒
PE_ACC … GYRO_bias造成的位置誤差;單位:米。
以上兩個方程式可用于計算典型慣性傳感器的性能和長期偏差穩(wěn)定性引起的水平位置誤差。當慣性傳感器與GPS集成在一起時,這些誤差不會隨時間推移而擴大,其它引起位置誤差的因素,如失匹、非線性和溫度影響,也應在計算中給予考慮。
最近在MEMS制程上取得的進步讓 MEMS加速度計和陀螺儀能夠連續(xù)地提供更高的定位性能,使商用級的產(chǎn)品更加接近戰(zhàn)術級產(chǎn)品的性能。在較短的時間如1分鐘內(nèi),獨立的加速度計和陀螺儀可取得相對較高的測量精度。當GPS信號受阻時,這對于GPS/SINS一體化導航系統(tǒng)很有用。
對于消費電子產(chǎn)品,室內(nèi)行人航位推算系統(tǒng)5%的行進距離誤差通常是可以接受的。例如,當一個人走過100米的距離時,定位誤差應該在5米范圍內(nèi)。這要求航向誤差在 ±2°到±5°之間。例如,如果航位誤差是2°,當一個人走過100米的距離時,定位誤差應該在3.5米范圍內(nèi) [= 2*100m*sin(2°/2)]。
此外,MEMS壓力傳感器能夠測量相對于海平面的絕對氣壓。因此,MEMS傳感器可以確定手機用戶在海平面以下 600米到海平面以上 9000米之間的高度,輔助GPS的高度測量。圖3所2示是利用MEMS傳感器與GPS接收器的行人航位推算系統(tǒng)結構圖。
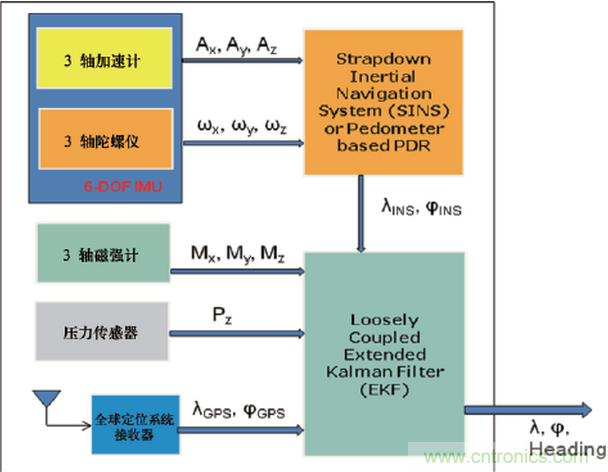
圖 2: 移動設備行人航位推算系統(tǒng)結構圖
3. MEMS傳感器整合
傳感器整合是一套數(shù)字濾波算法,用于修正每個獨立傳感器的缺陷,然后輸出精確的響應快速的動態(tài)的(俯仰/滾轉/偏航)姿態(tài)測量結果。傳感器整合的目的是把每個傳感器的測量數(shù)據(jù)作為輸入數(shù)據(jù),然后應用數(shù)字過濾算法對輸入數(shù)據(jù)進行相互修正,最后輸出精確的響應快速的動態(tài)的姿態(tài)測量結果。因此,航向或方位不受環(huán)境磁干擾的影響,沒有陀螺儀的零偏漂移問題。
能夠修正傾斜度的數(shù)字羅盤是由一個3軸加速度計和一個3軸磁力計組成,可提供以地球北極為參考的航向信息。但是這個航向信息容易受到環(huán)境磁力的干擾。如果安裝一個3軸陀螺儀,開發(fā)一個9軸傳感器整合解決方案,則可以隨時隨地保持精確的航向信息。
在設計一個使用多個MEMS傳感器的系統(tǒng)時,了解下表所列的每個MEMS傳感器的優(yōu)缺點是很重要的。
●加速度計:在靜態(tài)或慢速運動狀態(tài)下可用于傾斜度修正型數(shù)字羅盤;可用于計步器的檢測功能,檢測步行人當前的狀態(tài)是靜止還是運動。不過,當系統(tǒng)在3D空間靜止時,加速度計無法區(qū)分真正的線性加速度與地球重力,而且容易受到震動和振蕩的影響。
●陀螺儀:可以連續(xù)提供從系統(tǒng)載體坐標到局部地球水平坐標的旋轉矩陣,當磁力計受到干擾時,陀螺儀可輔助數(shù)字羅盤計算航向數(shù)據(jù)。長時間的零偏漂移導致無限制的姿態(tài)和定位錯誤。
●磁力計:可計算以地球北極為參考方向的絕對航向,并且可用于校準陀螺儀的靈敏度,但容量受到環(huán)境磁場的干擾。
●壓力傳感器:在室內(nèi)導航時,壓力傳感器可告訴你身處哪一樓層,輔助GPS計算高度;當GPS信號變?nèi)鯐r,輔助GPS提高定位精度,但是容易受到氣流和天氣狀況的影響。
基于以上各方面考慮,卡爾曼濾波器是最常用的整合不同的傳感器輸入信息的數(shù)學方法。這種方法權衡不同的傳感器的作用,給性能最高的方面最高權數(shù),因此,與基于單一媒介的導航系統(tǒng)相比,卡爾曼濾波器算法的估算結果更精確可靠。
目前基于四元數(shù)的擴展型卡爾曼濾波器(EKF)是一個很受歡迎的傳感器整合方案,因為四元數(shù)只有4個元素,而旋轉矩陣有9個元素,此外,四元數(shù)法還避免了旋轉矩陣的特殊問題 。
4. 結論
隨時隨地精確定位是增強實境等先進移動應用面臨的主要挑戰(zhàn),因為增強實境與行人航位推算(PDR)或定位服務(LBS)的關系密切。鑒于GPS接收器的接收限制,MEMS傳感器對室內(nèi)行人航位推算應用很有吸引力,因為這些傳感器大多數(shù)已經(jīng)出現(xiàn)在智能手機內(nèi)。
要想取得5%的室內(nèi)行人航位推算定位誤差,需要開發(fā)MEMS傳感器整合算法,以修正每個傳感器的缺陷,使這些傳感器實現(xiàn)優(yōu)勢互補。隨著MEMS傳感器的性能不斷提高,在不遠的將來,與用戶無關的SINS/GPS一體化導航系統(tǒng)將會成為智能手機的標準配置。
【推薦閱讀】


