
【導讀】由于霍爾傳感器的非接觸式測量原理和高可靠性,在許多應用中,用霍爾傳感器實現(xiàn)的感知方案成為了首選。本文分析了信號路徑設計是如何影響輸出信號的抖動性能的,并介紹了解決這一問題所采取的不同設計方法。
作為汽車產(chǎn)業(yè)的一個組成部分,霍爾效應傳感器用于在諸如底盤、安全、車身、保障及動力傳動等極其廣泛的一系列應用中檢測端位置或測量線性或角運動。目前,主導汽車行業(yè)研發(fā)討論的一個重要話題是功能安全。功能安全影響到所有應用系統(tǒng)組件的設計和功能設置,包括霍爾傳感器。
由于霍爾傳感器的非接觸式測量原理和高可靠性,在許多應用中,用霍爾傳感器實現(xiàn)的感知方案成為了首選。
例如,由于霍爾傳感器對環(huán)境條件(如灰塵、濕度和振動)的不敏感性,即使在十分苛刻環(huán)境溫度條件下(-40℃至150℃),其測量結(jié)果的一致性仍然很好,再加上其不受使用時間和使用次數(shù),而影響測量精度的高品質(zhì)等特性,霍爾效應傳感器正逐步取代機械開關。
為了實現(xiàn)不斷發(fā)展的安全和可靠性特性,開關閾值的最高精度成為了霍爾開關規(guī)范的基本參數(shù)。
在由一個磁信號通過開關閾值觸發(fā)的實際開關操作中,其動作會受開關延遲、采樣抖動和噪聲閾值等各因素的影響。上述這些因素都是不希望的,一個理想的開關應在瞬間做出反應,但由于霍爾IC的內(nèi)部信號處理,它們無法完全避免。
為了獲得最佳開關性能, Micronas公司的霍爾效應開關系列的最新產(chǎn)品(HAL 15xy)內(nèi)的信號處理對此進行了專門設計,以增強對這些負面影響的抑制能力。
本文分析了信號路徑設計是如何影響輸出信號的抖動性能的,并介紹了解決這一問題所采取的不同設計方法。
霍爾開關的信號路徑
霍爾開關的簡化信號路徑包括幾個基本組件,如圖1所描述:
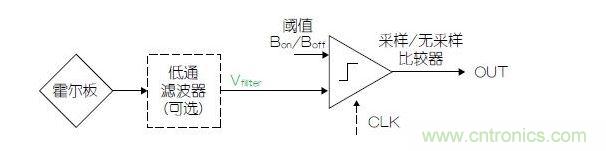
圖1:簡化的霍爾開關信號路徑。
該集成霍爾傳感器將磁通密度轉(zhuǎn)換成電信號,可選的低通濾波器限制了信號帶寬,采樣或無采樣比較器判定該信號是高于還是低于當前的作用閾值。
每次被采樣時鐘觸發(fā)時,被采樣的比較器都做出新決策;而未被采樣的比較器無需觸發(fā)持續(xù)運行。
在采用低通濾波器的情況下,它抑制高于有用信號帶寬的頻率分量,以降低這些頻率范圍產(chǎn)生的噪聲。
許多霍爾傳感器IC,包括Micronas的霍爾開關系列,采用著名的旋轉(zhuǎn)電流(spinning-current)技術以實現(xiàn)優(yōu)異的補償性能。為簡化,圖1省略了所有與旋轉(zhuǎn)電流相關的模塊。
帶滯后的靜態(tài)開關行為
霍爾開關具有兩種不同的磁閾值——Bon和Boff,它們形成磁滯回線。此行為對避免不必要的翻轉(zhuǎn)或閃抖是必要的,若沒有這種遲滯,則會發(fā)生這種不必要的麻煩。圖2顯示的是假設在非反向輸出狀態(tài)時的靜態(tài)輸出狀態(tài)與磁通密度B的對比曲線圖。
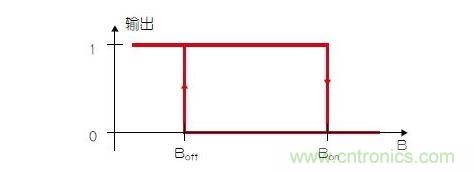
圖2:霍爾開關的靜態(tài)磁滯回線。
在Bon和Boff之間,兩個輸出狀態(tài)都是可能的。在B>Bon時,輸出肯定為0;在Boff前,開關都將保持為0;在Boff時,輸出變?yōu)?。
閾值噪聲和最小可靠滯后
現(xiàn)在可能有這個問題:磁滯回線可做得多???為給出答案,必須考慮閾值噪聲影響。實際上,Bon和Boff都不是限定為單一值的固定閾值,受由霍爾傳感器本身和其它電路的熱噪聲所引起的閾值噪聲的影響,這兩個值變得飄忽不定。取決于電流消耗和濾波器帶寬,噪聲水平可通過設計進行調(diào)整。噪聲添加到假定原本是恒定的閾值上?,F(xiàn)在,圖3顯示了Bon和Boff的概率密度函數(shù)(不按比例)。
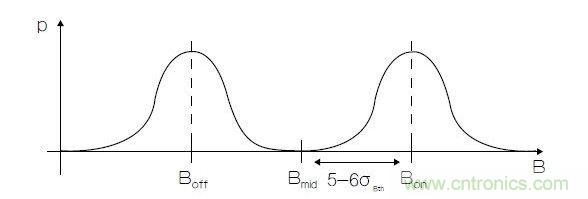
圖3:閾值噪聲的概率密度函數(shù)
概率密度的高度是其在相應磁通密度B條件下,找到瞬時閾值可能性的一種標度。對熱噪聲來說,其概率呈正態(tài)(高斯)分布。該密度函數(shù)的寬度由標準偏差σBth給出,其值與閥值的均方根(RMS)噪聲值Bth,rms相同。
因為密度不可能為0,Bon和Boff概率密度的尾線將總是在Bon和Boff的中點Bmid處趨合。這意味著,對于恒定磁通密度Bmid來說,Bon閥值有時可能(小概率)低于Bmid,從而打開開關。另外,Boff有時也可能高于Bmid,這又會關閉開關。這樣,即便對恒定磁通密度,開關也可能開始翻轉(zhuǎn),這通常是不希望的。這種現(xiàn)象不可能完全避免,但應充分減小其發(fā)生概率。作為經(jīng)驗法則,如果Bon-Boff的差值大于等于10~12σBth,則這種情況可以忽略不計。
[page]
濾波的采樣霍爾開關
HAL 15xy傳感器家族的信號處理基于帶低通濾波器的采樣設計。這樣,當對經(jīng)濾波的輸入進行新取樣時,開關輸出的翻轉(zhuǎn)僅在時間上的特定等距點才會發(fā)生,對HAL 15xy傳感器來說,是每隔2μs。在B穿過翻轉(zhuǎn)閾值的時間點與采樣時鐘不同步時,會導致采樣抖動。圖4給出了濾波采樣開關(如HAL 15xy)的時序樣例:
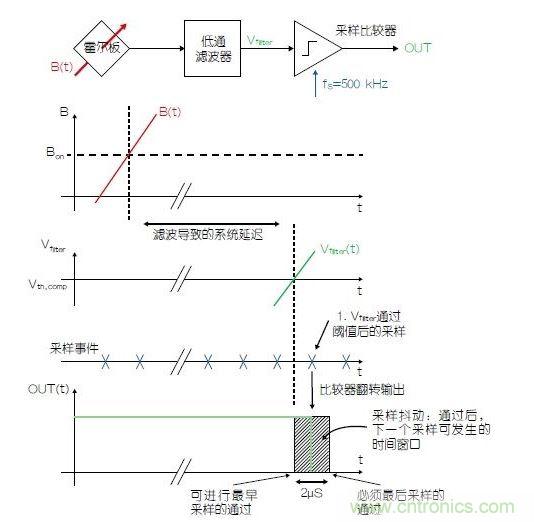
圖4:濾波采樣霍爾開關的延遲。
此處,假設磁通密度B(t) 在通過Bon時完成一個非常快的遷躍,以保持閾值噪聲影響在當下可忽略不計?;魻栃盘栒扔贐(t),然后使該信號通過一個低通濾波器,以消除更高帶寬的閾值噪聲。
它需要一個恒定的系統(tǒng)延遲Δtsyst,直到穿過閾值的信號通過濾波器,例如,這里的Δtsyst為15~16μs。此外,將出現(xiàn)最長為2μs的隨機延遲相位,直到下一次采樣發(fā)生且比較器翻轉(zhuǎn)。當霍爾開關反復翻轉(zhuǎn)時,該隨機延遲被稱為采樣抖動Δtsampling。
采樣抖動可由峰-峰值或均方根(RMS)值描述。在2μs采樣間隔內(nèi),由峰-峰值描述的HAL 15xy傳感器的Δtsampling=±1μs。所有時間點被發(fā)現(xiàn)的幾率是相同的(概率分布形狀像個“盒子”)。這樣,其RMS的典型值Δtsampling為0.58μs、最大值為0.72μs,比競爭產(chǎn)品具有更好性能。
對HAL 15xy系列產(chǎn)品來說,其采樣比較器選為工作在500 kHz采樣速率,以保證典型的采樣抖動被可靠地限制在±1μs。此類設計支持在比較器內(nèi)采用動態(tài)補償抑制,從而提升了HAL 15xy傳感器磁性閾值的整體精度。
另外,該傳感器有一個獨特的前端設計,通過使用金屬掩模編程,在不增加采樣抖動的情況下,可實現(xiàn)對低通濾波器的帶寬在3kHz和93kHz間的靈活定義。一方面,較小的帶寬增大了信號路徑的系統(tǒng)延遲;但另一方面,也降低了開關的閾值噪聲、提高了精度。更高帶寬的情況與上述正好相反。歸功于該特性, HAL 15xy系列可針對具有快速動態(tài)或靜態(tài)磁場要求的應用進行客戶定制。
無濾波的采樣霍爾開關
像Micronas的HAL 5xy系列等霍爾開關,采用的是沒有濾波IC的設計。根據(jù)顧客喜好,沒有濾波的低延遲特性對快速響應有吸引力,但代價是噪聲閾值的增加。對這樣的霍爾開關來說,采樣抖動仍然存在,但因沒有濾波器加入,其系統(tǒng)延遲沒有了。圖5顯示了此類開關的一般動態(tài)行為。
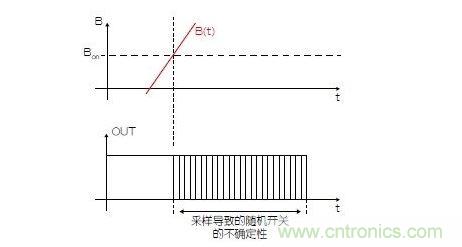
圖5:沒有濾波的采樣霍爾開關的延遲。
這就是為什么HAL 5xy傳感器隨機延遲的峰-峰值Δtsampling,pp=±8μs,而RMS值Δtsampling,rms.=±4.6μs,這一對比,凸顯了同樣來自Micronas的其繼任產(chǎn)品HAL 15xy的更佳性能。
[page]
濾波的無采樣霍爾開關
一些無采樣霍爾開關會有由濾波引入的系統(tǒng)延遲以及由內(nèi)部比較器熱噪聲導致的隨機延遲。因此,這類似HAL 15xy的情況,只是翻轉(zhuǎn)不確定性的概率密度呈正態(tài)分布,看上去像高斯曲線,而非“盒子”狀。其中,出現(xiàn)的只有總開關抖動,它沒有采樣抖動成分。圖6顯示的是這種狀態(tài)。
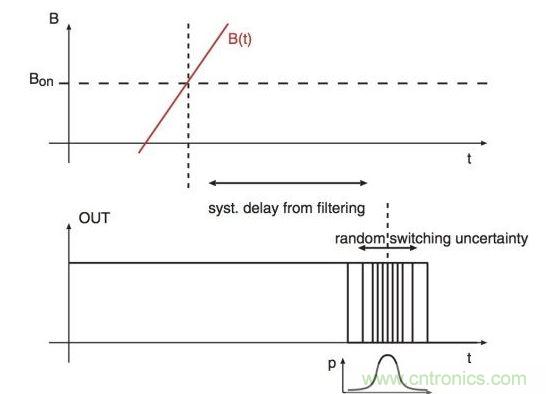
圖6:濾波無采樣霍爾開關的延遲。
Syst. Delay from filtering: 濾波導致的系統(tǒng)延遲
Random switching uncertainly: 隨機開關的不確定性
對正態(tài)分布來說,無法給出峰-峰值(但通常采用±3σ),只定義了標準偏差σ,此處,σ等于開關抖動的RMS值?;谠撛O計方法的霍爾IC在最佳情況下,所能有的最大輸出RMS抖動為1μs,且無法提供諸如HAL 15xy傳感器系列那種帶濾波采樣霍爾開關的高性能。
有效閾值噪聲和遲滯收窄
如在開始時說的,在一定范圍內(nèi),每個開關閾值會表現(xiàn)出由閾值噪聲導致的非正態(tài)分布。標準偏差σBth描述了這種分布的寬度。然而,由于閾值噪聲被開關的遲滯作用所扭曲,所以在應用中,無法直接測量它,也無法直接用于評估噪聲引起的誤差。
在應用中,基于通過“嘈雜”閾值區(qū)域的磁通密度B的變化速率,只需考慮部分閾值噪聲。幸運的是,這一可觀察的部分通常比真實閾值噪聲小,在本文中稱其為“有效閾值噪聲”。另外,可觀察到“閾值走動”或“滯后收窄”。此偏移的閾值分布或有效分布在測量開關特性時被觀察,其與真實閾值分布不同。圖7試圖說明這種效果。
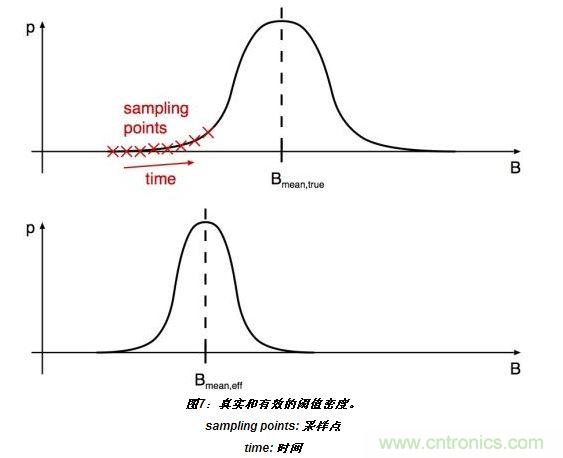
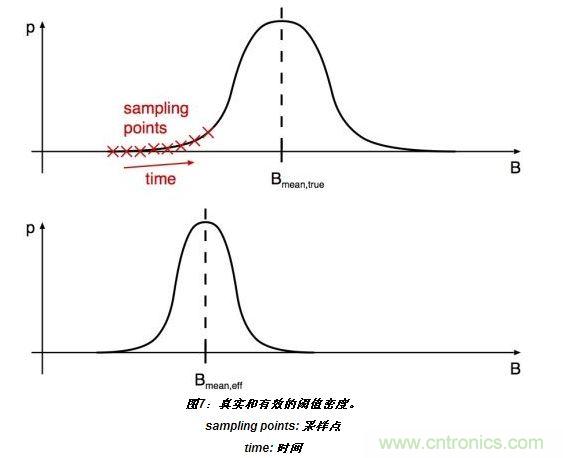
圖7的上半部分顯示了嘈雜閾值的真實分布。標有“X”的位置表示的值B(t)相關于開關在t=T0、T0+T和T0+2T(T:采樣間隔)等時刻的采樣。
在每個“X”標記,霍爾開關確定B(t)是高于還是低于閾值。在真實分布的左側(cè)尾部,對每一單一采樣來說,找到B(t)在閾值以上的概率仍小。然而,累計到當前采樣的翻轉(zhuǎn)概率絕對大,因此,如果在B(t)仍在左側(cè)尾部時執(zhí)行足夠的采樣,則開關仍將翻轉(zhuǎn)。
假定一個緩慢行進的B(t),在開關翻轉(zhuǎn)前,不太可能達到真實分布的右半部分,它會跳躍到其它閾值。圖7的下半部分此時顯示的是可觀察的噪聲效果的有效分布,于真實分布相比,它明顯地偏移了。當然平均值也偏移了,并導致遲滯窗口小幅收窄。收窄幅度和有效分布寬度取決于B(t)的斜率。
[page]
HAL 15xy系列開關抖動的產(chǎn)生原因
最有趣的是霍爾開關開關抖動Δtswitch的產(chǎn)生原因。開關延遲的隨機分布——開關抖動,可根據(jù)圖8予以考慮。

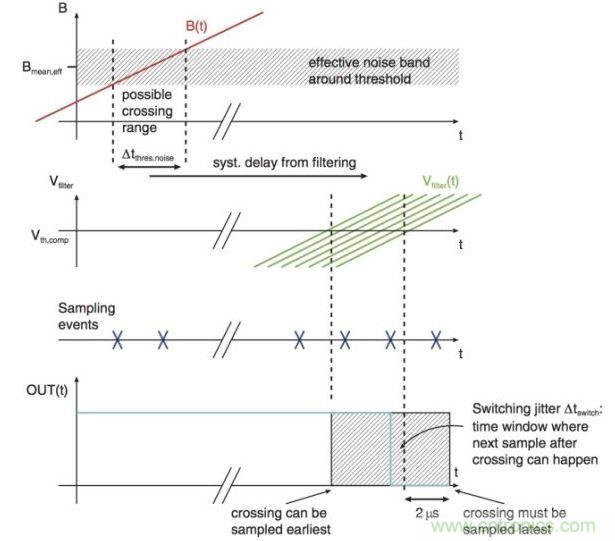
圖8:由閾值噪聲和采樣抖動引發(fā)的開關抖動。
Hall plate: 霍爾板
Low-pass filter: 低通濾波器
Sampled comparator: 采樣比較器
Possible crossing range: 可能的通過范圍
Effective noise band around threshold: 閥值周圍的有效噪聲帶
Syst. Delay from filtering:過濾導致的系統(tǒng)延遲
Sample events: 采樣事件
Sampling jitter△tswitch: time window where next sample after crossing can
happen: 采樣抖動△tswitch:通過后,下一個采樣可發(fā)生的時間窗口
Crossing can be sampled earliest:可進行最早采樣的通過
Crossing must be sampled latest: 必須最后采樣的通過
在此,閾值噪聲和采樣抖動都存在,導致了組合開關抖動。B(t)緩慢穿過有效閾值,因此閾值噪聲不能再忽略。在有效閾值周圍繪制了噪聲帶。圖8表示瞬時閾值可以被定位在哪里。噪聲頻帶內(nèi),B(t)在時間軸上的投影只是給出了來自閾值噪聲的時序抖動Δtthres.noise。這種時序抖動出現(xiàn)在濾波器輸出電壓Vfilter時是有延遲的?,F(xiàn)在,當輸出翻轉(zhuǎn)時,最終的開關抖動包含來自閾值噪聲的抖動以及始終存在的采樣抖動。
注意,圖8忽略了來自閾值噪聲和采樣抖動這兩種抖動的不同概率密度,另外,這兩者都會影響開關抖動。對高斜率來說,采樣抖動占主導且可被用來估計開關抖動。對低斜率來說,采樣抖動雖也存在,但有效閥值噪聲是主導。
通過設置使采樣抖動Δtsampling,rms=Bth,rms抖動(閥值噪聲引入),可容易地發(fā)現(xiàn)高、低斜率之間的邊界。
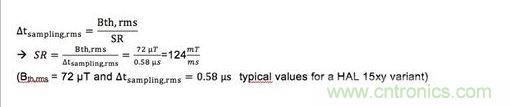
因此,當磁變化速率遠低于124mT/ms時,所產(chǎn)生的開關抖動可僅根據(jù)來從閾值噪聲的抖動進行評估,采樣抖動可忽略不計。
結(jié)論
霍爾開關的抖動有兩個來源。第一,霍爾板的熱噪聲和信號處理導致的閾值噪聲;第二,采樣引致因系統(tǒng)而異的采樣抖動。通過Micronas專有技術的優(yōu)化配置,HAL 15xy傳感器系列工作于非常高的采樣頻率,因此,產(chǎn)生的采樣抖動非常小。這種新的和優(yōu)化的電路設計,可以在保證極低熱噪聲的同時保持低功耗,具有同類產(chǎn)品最佳的噪音表現(xiàn)。此外,可通過金屬掩膜編程減少或增加模擬濾波器的帶寬,使最小化噪聲或延遲時間成為可能。




