
【導(dǎo)讀】各種控制模式PWM反饋方法的選擇一定要結(jié)合考慮具體的開(kāi)關(guān)電源的輸入輸出電壓要求、主電路拓?fù)浼捌骷x擇、輸出電壓的高頻噪聲大小、占空比變化范圍等。不同的PWM反饋控制模式具有各自不同的優(yōu)缺點(diǎn),在設(shè)計(jì)開(kāi)關(guān)電源選用時(shí)要根據(jù)具體情況選擇合適的PWM的控制模式。
PWM開(kāi)關(guān)穩(wěn)壓或穩(wěn)流電源基本工作原理就是在輸入電壓變化、內(nèi)部參數(shù)變化、外接負(fù)載變化的情況下,控制電路通過(guò)被控制信號(hào)與基準(zhǔn)信號(hào)的差值進(jìn)行閉環(huán)反饋,調(diào)節(jié)主電路開(kāi)關(guān)器件的導(dǎo)通脈沖寬度,使得開(kāi)關(guān)電源的輸出電壓或電流等被控制信號(hào)穩(wěn)定。 PWM的開(kāi)關(guān)頻率一般為恒定,控制取樣信號(hào)有:輸出電壓、輸入電壓、輸出電流、輸出電感電壓、開(kāi)關(guān)器件峰值電流。由這些信號(hào)可以構(gòu)成單環(huán)、雙環(huán)或多環(huán)反饋系統(tǒng),實(shí)現(xiàn)穩(wěn)壓、穩(wěn)流及恒定功率的目的,同時(shí)可以實(shí)現(xiàn)一些附帶的過(guò)流保護(hù)、抗偏磁、均流等功能。對(duì)于定頻調(diào)寬的PWM閉環(huán)反饋控制系統(tǒng),主要有五種PWM 反饋控制模式。下面以VDMOS開(kāi)關(guān)器件構(gòu)成的穩(wěn)壓正激型降壓斬波器為例說(shuō)明五種PWM反饋控制模式的發(fā)展過(guò)程、基本工作原理、詳細(xì)電路原理示意圖、波形、特點(diǎn)及應(yīng)用要點(diǎn),以利于選擇應(yīng)用及仿真建模研究。
開(kāi)關(guān)電源PWM的五種反饋控制模式
1. 電壓模式控制PWM (VOLTAGE-MODE CONTROL PWM):
如圖1所示為BUCK降壓斬波器的電壓模式控制PWM反饋系統(tǒng)原理圖。電壓模式控制PWM是六十年代后期開(kāi)關(guān)穩(wěn)壓電源剛剛開(kāi)始發(fā)展起就采用的第一種控制方法。該方法與一些必要的過(guò)電流保護(hù)電路相結(jié)合,至今仍然在工業(yè)界很好地被廣泛應(yīng)用。電壓模式控制只有一個(gè)電壓反饋閉環(huán),采用脈沖寬度調(diào)制法,即將電壓誤差放大器采樣放大的慢變化的直流信號(hào)與恒定頻率的三角波上斜波相比較,通過(guò)脈沖寬度調(diào)制原理,得到當(dāng)時(shí)的脈沖寬度,見(jiàn)圖1A中波形所示。逐個(gè)脈沖的限流保護(hù)電路必須另外附加。主要缺點(diǎn)是暫態(tài)響應(yīng)慢。當(dāng)輸入電壓突然變小或負(fù)載阻抗突然變小時(shí),因?yàn)橛休^大的輸出電容C 及電感L相移延時(shí)作用,輸出電壓的變小也延時(shí)滯后,輸出電壓變小的信息還要經(jīng)過(guò)電壓誤差放大器的補(bǔ)償電路延時(shí)滯后,才能傳至PWM比較器將脈寬展寬。這兩個(gè)延時(shí)滯后作用是暫態(tài)響應(yīng)慢的主要原因。圖1A電壓誤差運(yùn)算放大器(E/A)的作用有三:①將輸出電壓與給定電壓的差值進(jìn)行放大及反饋,保證穩(wěn)態(tài)時(shí)的穩(wěn)壓精度。該運(yùn)放的直流放大增益理論上為無(wú)窮大,實(shí)際上為運(yùn)放的開(kāi)環(huán)放大增益。②將開(kāi)關(guān)電源主電路輸出端的附帶有較寬頻帶開(kāi)關(guān)噪聲成分的直流電壓信號(hào)轉(zhuǎn)變?yōu)榫哂幸欢ǚ档谋容^“干凈”的直流反饋控制信號(hào)(VE)。即保留直流低頻成分,衰減交流高頻成分。因?yàn)殚_(kāi)關(guān)噪聲的頻率較高,幅值較大,高頻開(kāi)關(guān)噪聲衰減不夠的話,穩(wěn)態(tài)反饋不穩(wěn);高頻開(kāi)關(guān)噪聲衰減過(guò)大的話,動(dòng)態(tài)響應(yīng)較慢。雖然互相矛盾,但是對(duì)電壓誤差運(yùn)算放大器的基本設(shè)計(jì)原則仍是“低頻增益要高,高頻增益要低”。③對(duì)整個(gè)閉環(huán)系統(tǒng)進(jìn)行校正,使得閉環(huán)系統(tǒng)穩(wěn)定工作。電壓模式控制的優(yōu)點(diǎn):①PWM三角波幅值較大,脈沖寬度調(diào)節(jié)時(shí)具有較好的抗噪聲裕量。②占空比調(diào)節(jié)不受限制。③對(duì)于多路輸出電源,它們之間的交互調(diào)節(jié)效應(yīng)較好。④單一反饋電壓閉環(huán)設(shè)計(jì)、調(diào)試比較容易。⑤對(duì)輸出負(fù)載的變化有較好的響應(yīng)調(diào)節(jié)。缺點(diǎn):①對(duì)輸入電壓的變化動(dòng)態(tài)響應(yīng)較慢。②補(bǔ)償網(wǎng)絡(luò)設(shè)計(jì)本來(lái)就較為復(fù)雜,閉環(huán)增益隨輸入電壓而變化使其更為復(fù)雜。③輸出LC濾波器給控制環(huán)增加了雙極點(diǎn),在補(bǔ)償設(shè)計(jì)誤差放大器時(shí),需要將主極點(diǎn)低頻衰減,或者增加一個(gè)零點(diǎn)進(jìn)行補(bǔ)償。
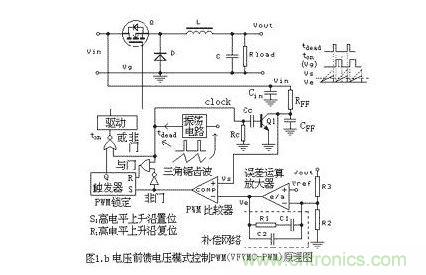
④在傳感及控制磁芯飽和故障狀態(tài)方面較為麻煩復(fù)雜。改善加快電壓模式控制瞬態(tài)響應(yīng)速度的方法有二:一是增加電壓誤差放大器的帶寬,保證具有一定的高頻增益。但是這樣比較容易受高頻開(kāi)關(guān)噪聲干擾影響,需要在主電路及反饋控制電路上采取措施進(jìn)行抑制或同相位衰減平滑處理。另一方法是采用電壓前饋模式控制 PWM技術(shù),如圖1B所示。用輸入電壓對(duì)電阻電容(RFF、 CFF)充電產(chǎn)生的具有可變化上斜波的三角波取代傳統(tǒng)電壓模式控制PWM中振蕩器產(chǎn)生的固定三角波。因?yàn)榇藭r(shí)輸入電壓的變化能立刻在脈沖寬度的變化上反映出來(lái),因此該方法對(duì)輸入電壓的變化引起的瞬態(tài)響應(yīng)速度明顯提高。對(duì)輸入電壓的前饋控制是開(kāi)環(huán)控制,目的為了增加對(duì)輸入電壓變化的動(dòng)態(tài)響應(yīng)速度。對(duì)輸出電壓的控制是閉環(huán)控制。因而,這是一個(gè)有開(kāi)環(huán)和閉環(huán)構(gòu)成的雙環(huán)控制系統(tǒng)。
[page]
2. 峰值電流模式控制PWM (PEAK CURRENT-MODE CONTROL PWM):
峰值電流模式控制簡(jiǎn)稱(chēng)電流模式控制,它的概念在六十年代后期來(lái)源于具有原邊電流保護(hù)功能的單端自激式反激開(kāi)關(guān)電源。在七十年代后期才從學(xué)術(shù)上作深入地建摸研究。直至八十年代初期,第一批電流模式控制PWM集成電路的出現(xiàn)使得電流模式控制迅速推廣應(yīng)用。主要用于單端及推挽電路。近年來(lái),由于大占空比時(shí)所必需的同步不失真斜坡補(bǔ)償技術(shù)實(shí)現(xiàn)上的難度及抗噪聲性能差,電流模式控制面臨著改善性能后的電壓模式控制的挑戰(zhàn)。因?yàn)檫@種改善性能的電壓模式控制加有輸入電壓前饋功能,并有完善的多重電流保護(hù)等功能,在控制功能上已具備大部分電流模式控制的優(yōu)點(diǎn),而在實(shí)現(xiàn)上難度不大,技術(shù)較為成熟。
如圖2所示,由輸出電壓VOUT 與基準(zhǔn)信號(hào)VREF的差值經(jīng)過(guò)運(yùn)放(E/A)放大得到的誤差電壓信號(hào) VE 送至PWM比較器后,并不是象電壓模式那樣與振蕩電路產(chǎn)生的固定三角波狀電壓斜波比較,而是與一個(gè)變化的其峰值代表輸出電感電流峰值的三角狀波形或梯形尖角狀合成波形信號(hào)VΣ比較,然后得到PWM脈沖關(guān)斷時(shí)刻。因此(峰值)電流模式控制不是用電壓誤差信號(hào)直接控制PWM脈沖寬度,而是直接控制峰值輸出側(cè)的電感電流大小,然后間接地控制PWM脈沖寬度。電流模式控制是一種固定時(shí)鐘開(kāi)啟、峰值電流關(guān)斷的控制方法。因?yàn)榉逯惦姼须娏魅菀讉鞲?,而且在邏輯上與平均電感電流大小變化相一致。但是,峰值電感電流的大小不能與平均電感電流大小一一對(duì)應(yīng),因?yàn)樵谡伎毡炔煌那闆r下,相同的峰值電感電流的大小可以對(duì)應(yīng)不同的平均電感電流大小。而平均電感電流大小才是唯一決定輸出電壓大小的因素。在數(shù)學(xué)上可以證明,將電感電流下斜波斜率的至少一半以上斜率加在實(shí)際檢測(cè)電流的上斜波上,可以去除不同占空比對(duì)平均電感電流大小的擾動(dòng)作用,使得所控制的峰值電感電流最后收斂于平均電感電流。因而合成波形信號(hào)VΣ要有斜坡補(bǔ)償信號(hào)與實(shí)際電感電流信號(hào)兩部分合成構(gòu)成。當(dāng)外加補(bǔ)償斜坡信號(hào)的斜率增加到一定程度,峰值電流模式控制就會(huì)轉(zhuǎn)化為電壓模式控制。因?yàn)槿魧⑿逼卵a(bǔ)償信號(hào)完全用振蕩電路的三角波代替,就成為電壓模式控制,只不過(guò)此時(shí)的電流信號(hào)可以認(rèn)為是一種電流前饋信號(hào),見(jiàn)圖2所示。當(dāng)輸出電流減小,峰值電流模式控制就從原理上趨向于變?yōu)殡妷耗J娇刂啤?/div>

 [page]
[page]

當(dāng)處于空載狀態(tài),輸出電流為零并且斜坡補(bǔ)償信號(hào)幅值比較大的話,峰值電流模式控制就實(shí)際上變?yōu)殡妷耗J娇刂屏?。峰值電流模式控制PWM是雙閉環(huán)控制系統(tǒng),電壓外環(huán)控制電流內(nèi)環(huán)。電流內(nèi)環(huán)是瞬時(shí)快速的,是按照逐個(gè)脈沖工作的。
功率級(jí)是由電流內(nèi)環(huán)控制的電流源,而電壓外環(huán)控制此功率級(jí)電流源。在該雙環(huán)控制中,電流內(nèi)環(huán)只負(fù)責(zé)輸出電感的動(dòng)態(tài)變化,因而電壓外環(huán)僅需控制輸出電容,不必控制LC儲(chǔ)能電路。由于這些,峰值電流模式控制PWM具有比起電壓模式控制大得多的帶寬。峰值電流模式控制PWM的優(yōu)點(diǎn)是①暫態(tài)閉環(huán)響應(yīng)較快,對(duì)輸入電壓的變化和輸出負(fù)載的變化的瞬態(tài)響應(yīng)均快。②控制環(huán)易于設(shè)計(jì)③輸入電壓的調(diào)整可與電壓模式控制的輸入電壓前饋技術(shù)相妣美④簡(jiǎn)單自動(dòng)的磁通平衡功能⑤瞬時(shí)峰值電流限流功能,內(nèi)在固有的逐個(gè)脈沖限流功能。⑥自動(dòng)均流并聯(lián)功能。 缺點(diǎn)是①占空比大于50%的開(kāi)環(huán)不穩(wěn)定性,存在難以校正的峰值電流與平均電流的誤差。②閉環(huán)響應(yīng)不如平均電流模式控制理想。③容易發(fā)生次諧波振蕩,即使占空比小于50%,也有發(fā)生高頻次諧波振蕩的可能性。因而需要斜坡補(bǔ)償。④對(duì)噪聲敏感,抗噪聲性差。因?yàn)殡姼刑幱谶B續(xù)儲(chǔ)能電流狀態(tài),與控制電壓編程決定的電流電平相比較,開(kāi)關(guān)器件的電流信號(hào)的上斜波通常較小,電流信號(hào)上的較小的噪聲就很容易使得開(kāi)關(guān)器件改變關(guān)斷時(shí)刻,使系統(tǒng)進(jìn)入次諧波振蕩。⑤電路拓?fù)涫芟拗?。⑥?duì)多路輸出電源的交互調(diào)節(jié)性能不好。峰值電流模式控制PWM最主要的應(yīng)用障礙是容易振蕩及抗噪聲性差。振蕩可以來(lái)源于:器件開(kāi)啟時(shí)的反向恢復(fù)引起的電流尖刺,噪聲干擾,斜波補(bǔ)償瞬態(tài)幅值不足等。峰值電流模式控制的開(kāi)關(guān)電源容易在開(kāi)機(jī)啟動(dòng)及電壓或負(fù)載突然較大變化時(shí)發(fā)生振蕩。
[page]
3. 平均電流模式控制PWM (AVERAGE CURRENT-MODE CONTROL PWM):
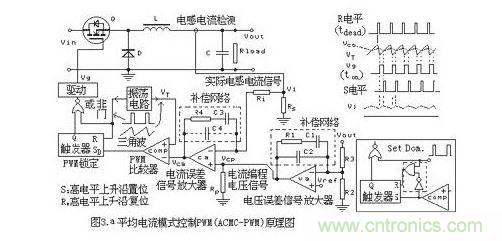
平均電流模式控制概念產(chǎn)生于七十年代后期。平均電流模式控制 PWM集成電路出現(xiàn)在九十年代初期,成熟應(yīng)用于九十年代后期。平均電流模式控制的發(fā)展動(dòng)力有三:一是峰值電流模式控制PWM在應(yīng)用推廣時(shí)碰到許多嚴(yán)重問(wèn)題;二是INTEL公司的高速CPU集成電路需要具有高DI/DT動(dòng)態(tài)響應(yīng)供電能力的低電壓大電流開(kāi)關(guān)電源;三是在八十年代后期平均電流模式控制理論研究上的進(jìn)展。圖3.A所示為平均電流模式控制PWM的原理圖。輸出電壓信號(hào)VOUT與基準(zhǔn)給定電壓VREF的差值經(jīng)過(guò)電壓誤差放大器E/A放大后得到誤差電壓VE,它接至電流誤差信號(hào)放大器CA的同相端,作為輸出電感電流的控制編程電壓信號(hào)VCP(V CURRENT- PROGRAM)。
而帶有鋸齒紋波狀分量的輸出電感電流信號(hào)VI接至電流誤差信號(hào)放大器CA的反相端,代表跟蹤電流編程信號(hào)VCP的實(shí)際電感平均電流。VI 與VCP的差值經(jīng)過(guò)電流放大器CA的放大后,得到平均電流跟蹤誤差信號(hào)VCA。再由VCA及三角鋸齒波信號(hào)VT或VS通過(guò)比較器比較得到PWM關(guān)斷時(shí)刻。 VCA的波形與電流波形VI反相,所以,是由VCA的下斜波(對(duì)應(yīng)于開(kāi)關(guān)器件導(dǎo)通時(shí)期)與三角波VT或VS的上斜波比較產(chǎn)生關(guān)斷信號(hào)。顯然,這就意味著無(wú)形中增加了一定的斜坡補(bǔ)償。為了避免次諧波振蕩,VCA的上斜坡不能超過(guò)三角鋸齒波信號(hào)VT或VS的上斜坡。平均電流模式控制的優(yōu)點(diǎn)是①平均電感電流能夠高度精確地跟蹤電流編程信號(hào)。②不需要斜坡補(bǔ)償。③調(diào)試好的電路抗噪聲性能優(yōu)越。④適合于任何電路拓?fù)鋵?duì)輸入或輸出電流的控制。⑤易于實(shí)現(xiàn)均流。缺點(diǎn)是① 電流放大器在開(kāi)關(guān)頻率處的增益有最大限制 ②雙閉環(huán)放大器帶寬、增益等配合參數(shù)設(shè)計(jì)調(diào)試復(fù)雜。
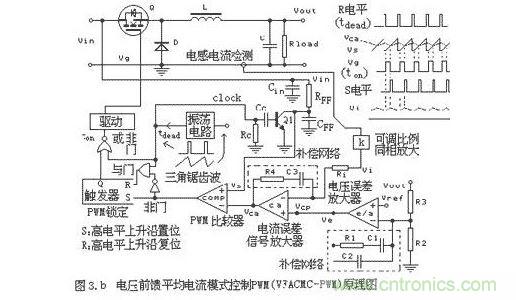
圖3.B為增加輸入電壓前饋功能的平均電流模式控制,非常適合輸入電壓變化幅度大、變化速度快的中國(guó)電網(wǎng)情況。澳大利亞R-T公司的48V/100A半橋電路通信開(kāi)關(guān)電源模塊實(shí)際上采用圖3.B的控制方式。
[page]
4. 滯環(huán)電流模式控制PWM (HYSTERETIC CURRENT-MODE CONTROL PWM):
滯環(huán)電流模式控制PWM為變頻調(diào)制,也可以為定頻調(diào)制。 如圖4所示,為變頻調(diào)制的滯環(huán)電流模式控制PWM。將電感電流信號(hào)與兩個(gè)電壓值比較,第一個(gè)較高的控制電壓值VC由輸出電壓與基準(zhǔn)電壓的差值放大得到,它控制開(kāi)關(guān)器件的關(guān)斷時(shí)刻;第二個(gè)較低電壓值VCH由控制電壓VC減去一個(gè)固定電壓值VH得到,VH叫做滯環(huán)帶,VCH控制開(kāi)關(guān)器件的開(kāi)啟時(shí)刻。滯環(huán)電流模式控制是由輸出電壓值VOUT、控制電壓值VC及VCH三個(gè)電壓值確定一個(gè)穩(wěn)定狀態(tài),比電流模式控制多一個(gè)控制電壓值VCH,去除了發(fā)生次諧波振蕩的可能性,見(jiàn)圖4右下示意圖。因?yàn)閂CH1=VCH2,圖4右下示意圖中的情況不會(huì)出現(xiàn)。其優(yōu)點(diǎn):①不需要斜波補(bǔ)償。②穩(wěn)定性好,不容易因噪聲發(fā)生不穩(wěn)定振蕩。缺點(diǎn):①需要對(duì)電感電流全周期的檢測(cè)和控制。②變頻控制容易產(chǎn)生變頻噪聲。
5. 相加模式控制PWM (SUMMING-MODE CONTROL PWM):
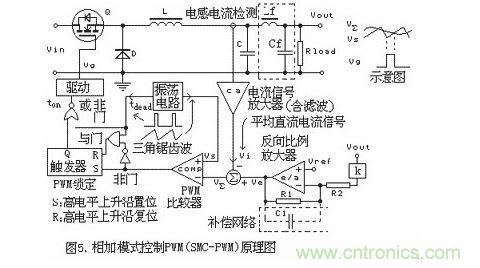
圖5所示為相加模式控制PWM的原理圖。與圖1.A所示的電壓模式控制有些相似,但有兩點(diǎn)不同:一是放大器(E/A)是比例放大器,沒(méi)有電抗性補(bǔ)償元件??刂齐娐分须娙軨1 較小起濾除高頻開(kāi)關(guān)雜波作用。主電路中的較小的LF、CF濾波電路(如圖中虛線所示,也可以不用)也起減小輸出高頻雜波作用。若輸出高頻雜波小的話,均可以不加。因此,電壓誤差放大沒(méi)有延時(shí)環(huán)節(jié),電流放大也沒(méi)有大延時(shí)環(huán)節(jié)。二是經(jīng)過(guò)濾波后的電感電流信號(hào)VI也與電壓誤差信號(hào)VE相加在一起構(gòu)成一個(gè)總和信號(hào) VΣ與三角鋸齒波比較,得到PWM控制脈沖寬度。相加模式控制PWM 是單環(huán)控制,但它有輸出電壓、輸出電流兩個(gè)輸入?yún)?shù)。如果輸出電壓或輸出電流變化,那么占空比將按照補(bǔ)償它們變化的方向而變化。其優(yōu)點(diǎn)是:動(dòng)態(tài)響應(yīng)快(比普通電壓模式控制快3~5倍),動(dòng)態(tài)過(guò)沖電壓小,輸出濾波電容需要較少。相加模式控制中的VI注入信號(hào)容易用于電源并聯(lián)時(shí)的均流控制。缺點(diǎn)是:需要精心處理電流、電壓取樣時(shí)的高頻噪聲抑制。
結(jié)論
不同的PWM反饋控制模式具有各自不同的優(yōu)缺點(diǎn),在設(shè)計(jì)開(kāi)關(guān)電源選用時(shí)要根據(jù)具體情況選擇合適的PWM的控制模式。
各種控制模式PWM反饋方法的選擇一定要結(jié)合考慮具體的開(kāi)關(guān)電源的輸入輸出電壓要求、主電路拓?fù)浼捌骷x擇、輸出電壓的高頻噪聲大小、占空比變化范圍等。 PWM控制模式是發(fā)展變化的,是互相聯(lián)系的,在一定的條件下是可以互相轉(zhuǎn)化的。




