

【導(dǎo)讀】光模塊采用基于雪崩光電二極管(APD)的光接收器支持高靈敏度設(shè)計(jì)。從 APD 接收到的反饋呈非線性(平均接收功率),這一非線性特性為優(yōu)化控制激光器模塊帶來一定困難,典型的 APD 非線性特性如圖 1 所示。
APD 特性
光模塊采用基于雪崩光電二極管(APD)的光接收器支持高靈敏度設(shè)計(jì)。從 APD 接收到的反饋呈非線性(平均接收功率),這一非線性特性為優(yōu)化控制激光器模塊帶來一定困難,典型的 APD 非線性特性如圖 1 所示。
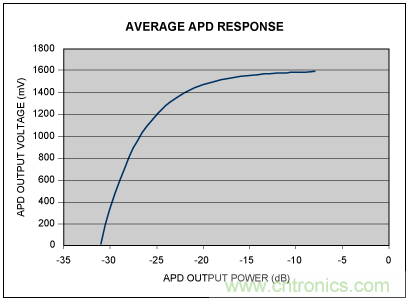
圖 1. 典型的 APD 響應(yīng)顯示了非線性特性
為了保證精準(zhǔn)操作,需要對(duì) APD 的非線性進(jìn)行補(bǔ)償。補(bǔ)償后可以為 SFP 控制器模塊提供線性反饋,提高系統(tǒng)穩(wěn)定性。補(bǔ)償后的 APD 響應(yīng)如圖 2 所示。
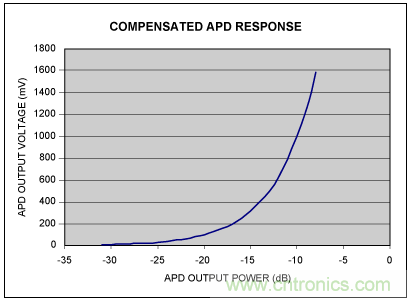
圖 2. 該平均曲線顯示了所期望的典型響應(yīng),生產(chǎn)過程中對(duì)響應(yīng)中微小變化的補(bǔ)償是不可行的。
使用 RSSI 修正非線性
Maxim 的光控制器,如 DS1875,能夠補(bǔ)償 APD 的非線性。
DS1875 的一個(gè)輸入通道(MON3)有兩個(gè)工作區(qū)(細(xì)調(diào)和粗調(diào))配置,每個(gè)區(qū)域都有其獨(dú)立的量程和偏置,用于校準(zhǔn)接收到的功率信號(hào)的非線性。校準(zhǔn)通過對(duì) APD 二極管的非線性響應(yīng)進(jìn)行分段線性近似,擬合完成。
除了提供兩個(gè)獨(dú)立的工作區(qū),DS1875 也可在細(xì)調(diào)區(qū)域?qū)?ADC 轉(zhuǎn)換結(jié)果進(jìn)行右移操作。即使輸入信號(hào)不能完全覆蓋輸入范圍,通過右移操作也可提高轉(zhuǎn)換精度。
滯回的重要性
在給定的交叉點(diǎn),DS1875 根據(jù)輸入信號(hào)的幅度自動(dòng)地在兩個(gè)工作區(qū)之間切換。在交叉點(diǎn)提供滯回,當(dāng)從粗調(diào)切換到細(xì)調(diào)時(shí),切換點(diǎn)會(huì)發(fā)生變動(dòng)。這能保證器件不會(huì)在兩個(gè)工作區(qū)間來回觸發(fā),造成不穩(wěn)定。
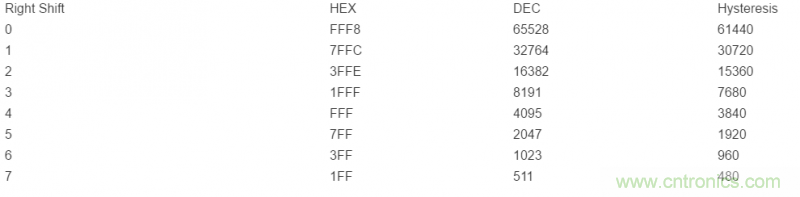
交叉點(diǎn)會(huì)根據(jù)針對(duì)細(xì)調(diào)范圍的右移位設(shè)定的不同而改變,表 1 列出了不同的右移設(shè)置下交叉點(diǎn)的改變。需要注意的是,DEC 欄到滯回(hysteresis)欄對(duì)應(yīng)的變化值。
表 1. 右移時(shí)的交叉點(diǎn)設(shè)置
校準(zhǔn) DS1875
DS1875 輸入端 MON3 的兩個(gè)工作區(qū)必須進(jìn)行校準(zhǔn),這樣才能準(zhǔn)確擬合所要求的 APD 響應(yīng)。按照下面過程進(jìn)行校準(zhǔn),可以得到兩個(gè)不同工作區(qū)的量程和偏置值。
對(duì)細(xì)調(diào)和粗調(diào)工作區(qū)進(jìn)行配置,以保證每個(gè)工作區(qū)的實(shí)際響應(yīng)為線性。寫入工廠預(yù)設(shè)值,使響應(yīng)為線性特性,同時(shí)將精調(diào)范圍的右移位設(shè)為 3。
在 MON3P 接入兩個(gè)輸入("a" dB 和"b" dB)。使用內(nèi)部工廠校準(zhǔn)值,測(cè)量 MON3 轉(zhuǎn)換數(shù)值。兩個(gè)輸入已配置成粗調(diào)范圍使用"a" dB,細(xì)調(diào)范圍使用"b" dB。輸入可選擇任何兩個(gè)點(diǎn),只要一個(gè)在細(xì)調(diào)區(qū),另一個(gè)在粗調(diào)區(qū)。根據(jù)測(cè)試得到的誤差,測(cè)量需進(jìn)行再評(píng)估,直到得到最佳的分段線性擬合。
步驟 2 得到的數(shù)值與期望用來補(bǔ)償 APD 非線性響應(yīng)的數(shù)值會(huì)有差別。所有細(xì)調(diào)和粗調(diào)區(qū)的量程和偏置也需要校準(zhǔn),這樣才能準(zhǔn)確匹配期望值。
將兩個(gè)被測(cè)值作為"x",這兩個(gè)點(diǎn)的期望輸出作為"y"值。
計(jì)算細(xì)調(diào)區(qū) ADC 的量程和偏置。該計(jì)算使用兩個(gè)點(diǎn),第一個(gè)點(diǎn)為第一次計(jì)算中(步驟 2)的 b dB 輸入測(cè)量的 x 值和 y 值(x1, y1);另一個(gè)點(diǎn)是(0, 0)點(diǎn)(x2, y2)。這個(gè)(0, 0)點(diǎn)是一個(gè)假設(shè)點(diǎn),只需使用 2 個(gè)數(shù)據(jù)點(diǎn)即可得出量程和偏置。如果(0, 0)不適合所期望的響應(yīng),那么用戶可以使用另一個(gè)數(shù)據(jù)點(diǎn)。
計(jì)算由下式完成:
y = m_fine × x + c_fine
其中,m_fine 代表量程,c_fine 代表偏置。
使用點(diǎn)(x2, y2),得到:
c_fine = 0
使用點(diǎn)(x1, y1),得到:
m_fine = y1/x1
為了得到所期望的響應(yīng),需找到最接近的右移位。將期望的輸出(點(diǎn) b dB 的 y 值)與表 1 的 DEC 值相比較。最接近上述期望輸出的 DEC 值將被用作 x 值。與之相應(yīng)的(y)值可以用上面的 m_fine 和 c_fine 推算,該點(diǎn)即為(x2, y2)。
使用(x2, y2)交叉點(diǎn)的值和 b dB 點(diǎn)(x3, y3)數(shù)值,由下式計(jì)算粗調(diào)區(qū) ADC 的量程和偏置:
y = m_coarse × x + c_coarse
將偏置(c_fine 和 c_coarse)裝載到 DS1875 相應(yīng)的寄存器。注意,如果這個(gè)偏置為負(fù)值,那么將其 2 進(jìn)制補(bǔ)碼寫入寄存器。
現(xiàn)在要分別整理細(xì)調(diào)和粗調(diào)區(qū)的量程,讀出兩個(gè)輸入的期望值(a dB 和 b dB)。
基于修正過的響應(yīng)(使用新的量程和偏置值)和期望的響應(yīng),可生成一條誤差曲線(圖 3 所示)。誤差曲線根據(jù)兩個(gè)點(diǎn)(a 和 b)的位置變化而變化。第一段斜線代表細(xì)調(diào)區(qū)的誤差;第二段斜線代表粗調(diào)區(qū)的誤差。誤差大小可以根據(jù)客戶要求,通過改變這兩個(gè)點(diǎn)的位置進(jìn)行調(diào)整。
結(jié)論
新的細(xì)調(diào)和粗調(diào)范圍可用來檢查器件是否近似擬合得到所期望的響應(yīng),圖 3 為圖 2 響應(yīng)的擬合結(jié)果。
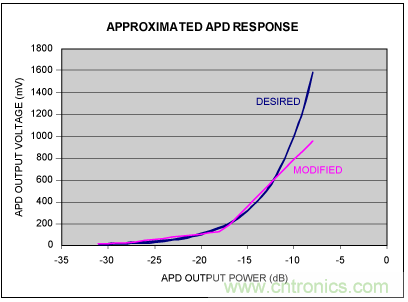
圖 3. 這個(gè)誤差曲線分別顯示了使用新的量程和偏置進(jìn)行修正的響應(yīng)和所期望的響應(yīng)
所期望的響應(yīng)特性與計(jì)算得到的響應(yīng)特性的誤差如圖 4 所示。
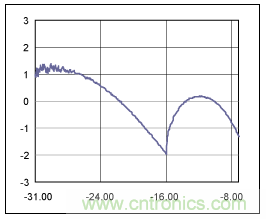
圖 4. 計(jì)算得到的響應(yīng)與所期望響應(yīng)的誤差
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請(qǐng)電話或者郵箱聯(lián)系小編進(jìn)行侵刪。



