
【導(dǎo)讀】在過去幾年中,對于具有足夠高效率管理大功率的系統(tǒng)的市場需求推動SMPS設(shè)計師開發(fā)出具有低電氣損耗的拓?fù)洹WM相移控制的全橋轉(zhuǎn)換器就是一種很流行的拓?fù)?,它能在大功率時取得很高的效率,并整合了硬開關(guān)技術(shù)和軟開關(guān)技術(shù)的優(yōu)點。本文的目的是研究MOSFET器件用作零壓開關(guān)(ZVS)轉(zhuǎn)換器中的開關(guān)時所受到的潛在電氣應(yīng)力。
零壓開關(guān)(ZVS)相移轉(zhuǎn)換器被廣泛用于滿足電源應(yīng)用市場,比如電信電源、主機計算機-服務(wù)器以及高功率密度和高效率是必需的任何應(yīng)用。為了達到這個目標(biāo),我們必須最大限度地減小功率損失和電抗值,這可以通過提高轉(zhuǎn)換器的開關(guān)頻率來實現(xiàn)。高開關(guān)頻率意味著更多的開關(guān)損失,這與效率目標(biāo)背道而馳。采用ZVS或零電流開關(guān)(ZCS)轉(zhuǎn)換器的拓?fù)涫强尚械慕鉀Q方案。這種技術(shù)可以保證開關(guān)中的電壓或電流在轉(zhuǎn)換之前是零,特別是ZVS能夠保證開關(guān)器件在導(dǎo)通之前器件上的電壓為零,從而避免開關(guān)電流和電壓的同時疊加引起的任何功率損失。
諸如帶線性控制的恒頻工作、在電源電路中集成雜散元件、低電磁干擾等好處與復(fù)雜的相位控制器、整流器上的振鈴和過沖、輕負(fù)載時軟開關(guān)的損耗等缺點是背道而馳的。最近,復(fù)雜控制器的問題通過引入集成控制器得到了減輕,而精選的開關(guān)也為輕負(fù)載條件提供了解決方案。轉(zhuǎn)換器中使用的MOSFET的一些電氣特性可以幫助系統(tǒng)降低故障風(fēng)險。本文將介紹風(fēng)險最有可能發(fā)生的操作順序。
零壓開關(guān)拓?fù)涿枋?/strong>
相移轉(zhuǎn)換器的基本電路由4個開關(guān)組成:每條“腿”兩個。根據(jù)工作模式,一條腿上的開關(guān)轉(zhuǎn)換總是在另一條腿之前發(fā)生。第一條腿通常被命名為“前腿”,另一條腿被命名為“后腿”。在圖1中,前腿由開關(guān)Q1和Q2組成,后腿由Q3和Q4組成。
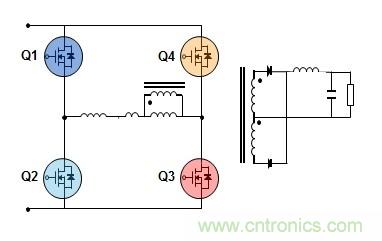
圖1:相移零電壓開關(guān)全橋電路。
對功率的控制是通過設(shè)置兩個相位之間的轉(zhuǎn)移時間實現(xiàn)的,具體地說,短時間用于提供大功率,長時間用于提供小功率。這種技術(shù)允許控制電源相位。
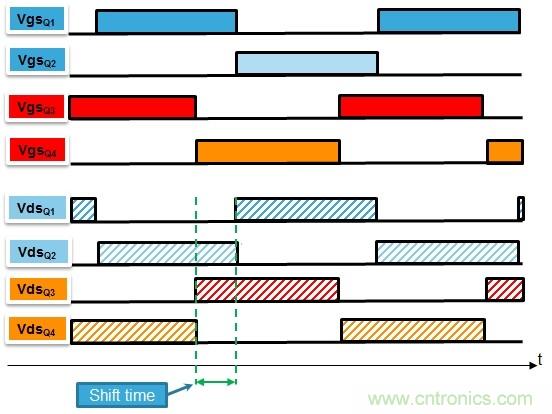
圖2:交換順序。
研究圖2所示的信號順序就很容易理解Q3和Q4位置的器件在另外兩個器件完成轉(zhuǎn)換之后才改變它們的狀態(tài)。換句話說,“前腿”中的器件Q3和Q4從通到斷或從斷到通的轉(zhuǎn)換要先于器件Q1和Q2完成。基于這樣的開關(guān)順序,“前腿”中的器件將處于“后腿”看不見的自由相位狀態(tài)。表1對這個開關(guān)順序進行了總結(jié)。

表1:開關(guān)順序總結(jié)。
這種控制技術(shù)可以減少開關(guān)損耗,因為整個工作過程是有管理的,只有當(dāng)器件上的電壓為零時才會發(fā)生從斷到通的轉(zhuǎn)換。圖3顯示了相移(P-S)零電壓開關(guān)轉(zhuǎn)換器上的典型波形。
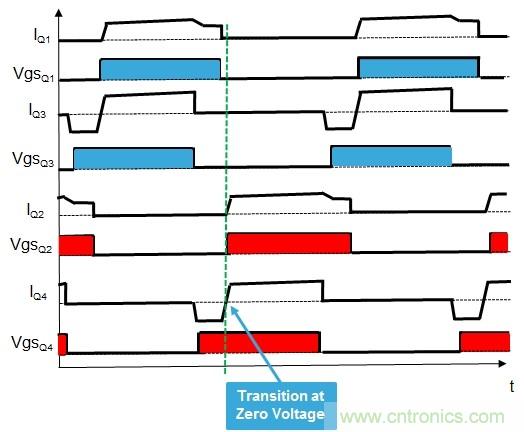
圖3:P-S ZVS FB DC/DC轉(zhuǎn)換器中的典型波形。
正如圖3中強調(diào)的那樣,如果重點關(guān)注Q4信號特別是它的電流,我們可以發(fā)現(xiàn)它由兩部分組成。在第一部分中,從源極到漏極流經(jīng)器件的電流被溝道和體二極管共享;在第二部分中,電流只在MOSFET溝道中從漏極流到源極。變壓器上的電壓一旦改變極性,電流就會發(fā)生反向。發(fā)揮這個順序的優(yōu)勢,后腿器件Q2在這個相位期間進行開關(guān),當(dāng)其電壓等于零時開始導(dǎo)通,從而實現(xiàn)ZVS轉(zhuǎn)換。
必須特別注意Q4器件中的電流。當(dāng)它的電流反向時,所施加的電壓是低電壓。由于電流由兩部分組成,消除體二極管中的少數(shù)載流子的持續(xù)時間(trr)與典型測試相比是較短的。集中的少數(shù)載流子主要鏈接到重組期間。基于這個理由,通常針對這種拓?fù)渫扑]使用具有快速恢復(fù)時間的器件。下一節(jié)介紹由于這方面的原因可能引起的故障風(fēng)險。
開關(guān)器件的故障風(fēng)險
正如前文所述,在ZVS轉(zhuǎn)換期間,MOSFET Q4的內(nèi)部體二極管參與到了工作中,其導(dǎo)通時間被負(fù)載電平所固定。為了調(diào)節(jié)發(fā)送的功率,兩腿之間的轉(zhuǎn)移時間是可變的,因此體二極管導(dǎo)通時間將從大功率時的短時間改變到輕負(fù)載時的短時間。
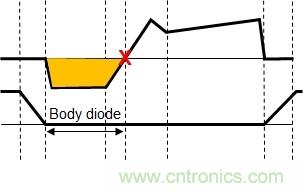
圖4:重負(fù)載時的典型波形。
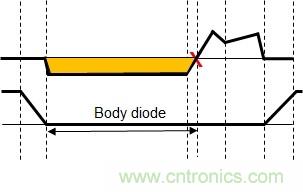
圖5:輕負(fù)載時的典型波形。
如果我們比較這兩種情況可以清楚地發(fā)現(xiàn),在圖5所示的輕負(fù)載情況下,重組可用的時間要比圖4所示情況短,甚至可能小于完成整個操作所需的時間。對這一瞬間重點觀察可以發(fā)現(xiàn),輕負(fù)載條件代表了針對這類風(fēng)險最重要的工作條件。
從圖6可以看到,紅色虛線顯示的是不同的恢復(fù)時間,并因為使用不適當(dāng)?shù)钠骷?dǎo)致的潛在風(fēng)險。三條不同的線模擬了三種不同的恢復(fù)時間。其中兩條線代表安全的情況,第三條線是可能發(fā)生故障的情況。在最后一種情況中,可用時間不足以完全恢復(fù)MOSFET中的少數(shù)載流子。
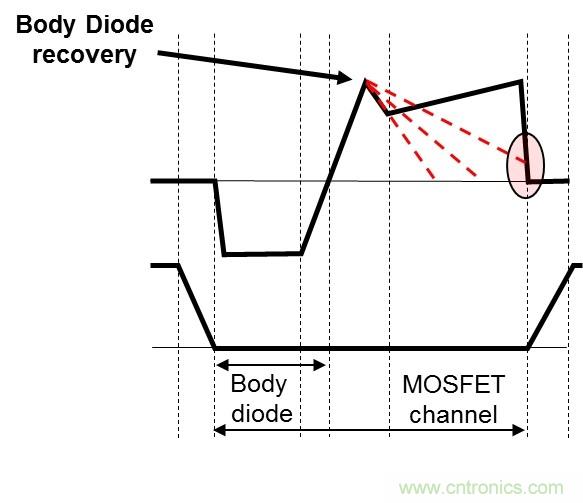
圖6:前腿器件中的典型波形。
為了減少由于這種電氣應(yīng)力造成的故障風(fēng)險,需要選用具有低trr和Qrr參數(shù)的MOSFET器件。有多種硅片技術(shù)可以用來解決ZVS拓?fù)渲邪l(fā)生的上述故障模式,而且也有多款MOSFET器件具有快速反向恢復(fù)時間和較好的dv/dt耐用性,非常適合較高頻率的ZVS全橋應(yīng)用。這種選擇通常也被SMPS制造商用來提高他們系統(tǒng)的可靠性。
圖6顯示了位于“前腿”的器件上的電流波形。相同的分析也可以應(yīng)用于“后腿”器件。至于“前腿”中的器件,“后腿”器件中的導(dǎo)通相位包括了它們內(nèi)部體二極管的恢復(fù)操作。在這種情況下,如果所選的器件與“前腿”相同,那么就看不出什么問題(圖7),因為與前一種情況相比此時有更多的時間用于恢復(fù)相位。
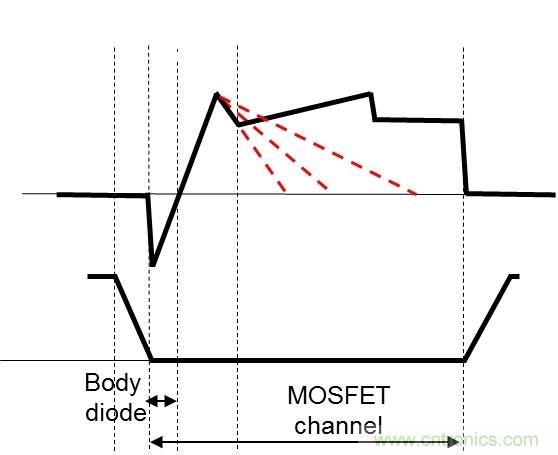
圖7:后腿器件上的典型波形。
本文小結(jié)
本文介紹了MOSFET器件用于相移ZVS轉(zhuǎn)換器時可能產(chǎn)生的潛在風(fēng)險。通過分析這種特定拓?fù)涞霓D(zhuǎn)換順序,文章著重強調(diào)了可能發(fā)生故障處的關(guān)鍵工作,并且指出拓?fù)渲械奈恢脤﹄姎鈶?yīng)力更加敏感。由于工作順序的原因,將該拓?fù)浞殖蓸?biāo)記為“前腿”和“后腿”的兩個部分。文章對MOSFET的一些電氣特性進行了研究,并形成了器件選擇依據(jù)。器件必須考慮“前腿”要求的trr和Qrr約束條件。正確的選擇可以提高系統(tǒng)的可靠性,降低故障風(fēng)險,進而獲得堅實耐用的設(shè)計。
文章來源于電子技術(shù)設(shè)計。
【推薦閱讀】




