
【導(dǎo)讀】設(shè)計(jì)采用高性能單片機(jī)C8051F020為控制芯片,監(jiān)控示波器面板上40個(gè)按鍵、3個(gè)編碼開關(guān)及4個(gè)電位器的狀態(tài)。分別介紹了鍵盤、編碼開關(guān)和電位器的工作原理,以及其與單片機(jī)連接的硬件電路及軟件編程的實(shí)現(xiàn)。按鍵部分采用一鍵多義的鍵盤程序設(shè)計(jì)方法,給出了鍵碼匹配子程序流程圖。
監(jiān)控程序負(fù)責(zé)系統(tǒng)中全部硬件和軟件資源的分配、調(diào)度工作,它提供用戶接口,使用戶獲得友好的工作環(huán)境,是系統(tǒng)設(shè)計(jì)中一個(gè)重要組成部分。
1 C8051F020單片機(jī)概述
伴隨著電子技術(shù)快速的發(fā)展,越來越多的人加入電子開發(fā)的大軍。在學(xué)習(xí)電子技術(shù)和研發(fā)項(xiàng)目的過程中,避免不了要使用一些儀器,例如萬用表、示波器等等,然而對于一些非專業(yè)的愛好者,擁有一臺數(shù)字示波器是比較“奢侈”的。本設(shè)計(jì)C8051F020單片機(jī),因其具有成本低、制作簡單、測量精度高等優(yōu)勢,恰恰滿足了這一部分人的需求。
C8051F020單片機(jī)是高度集成的片上系統(tǒng)。在芯片內(nèi)集成了2個(gè)多通道ADC子系統(tǒng)(每個(gè)子系統(tǒng)包括1個(gè)可編程增益放大器和1個(gè)模擬多路選擇器)、2 個(gè)電壓輸出DAC、2個(gè)電壓比較器、電壓基準(zhǔn)、SMBus/I2C總線接口、UART、SPI總線接口、5個(gè)通用的16位定時(shí)器、1個(gè)具有5個(gè)捕捉/比較模塊的可編程計(jì)數(shù)器/定時(shí)器陣列(PCA)、內(nèi)部振蕩器、8個(gè)8位通用數(shù)字I/0端口和64 KBFLASH程序存儲器,以及8051兼容的高速微控制器內(nèi)核。
C8051F020單片機(jī)是所有模擬和數(shù)字外設(shè)均可由用戶固件使能/禁止和配置。Flash 存儲器還具有在系統(tǒng)重新編程能力,可用于非易失性數(shù)據(jù)存儲,并允許現(xiàn)場更新8051 固件。片內(nèi)JTAG 調(diào)試電路允許使用安裝在最終應(yīng)用系統(tǒng)上的產(chǎn)品MCU 進(jìn)行非侵入式(不占用片內(nèi)資源)、全速、在系統(tǒng)調(diào)試。該調(diào)試系統(tǒng)支持觀察和修改存儲器和寄存器,支持?jǐn)帱c(diǎn)、觀察點(diǎn)、單步及運(yùn)行和停機(jī)命令。在使用JTAG 調(diào)試時(shí),所有的模擬和數(shù)字外設(shè)都可全功能運(yùn)行。
Cygnal出的一種混合信號系統(tǒng)級單片機(jī)。片內(nèi)含CIP-51的CPU內(nèi)核,它的指令系統(tǒng)與MCS-51完全兼容。其中的C8051F020單片機(jī)含有64kB片內(nèi)Flash程序存儲器,4352B的RAM、8個(gè)I/O端口共64根I/O口線、一個(gè)12位A/D轉(zhuǎn)換器和一個(gè)8位A/D轉(zhuǎn)換器以及一個(gè)雙12位D/A轉(zhuǎn)換器、2個(gè)比較器、5個(gè)16位通用定時(shí)器、5個(gè)捕捉/比較模塊的可編程計(jì)數(shù)/定時(shí)器陣列、看門狗定時(shí)器、VDD監(jiān)視器和溫度傳感器等部分。C8051F020單片機(jī)支持雙時(shí)鐘,其工作電壓范圍為2.7~3.6V(端口I/O,RST和JTAG引腳的耐壓為5V)。與以前的51系列單片機(jī)相比,C8051F020增添了許多功能,同時(shí)其可靠性和速度也有了很大提高。
2 一鍵多義鍵盤工作原理
一臺完善的智能儀表功能往往很多,設(shè)定的量程、參數(shù)也很多。如果還是用一鍵一個(gè)功能,勢必要有一個(gè)很大的鍵盤,面板相應(yīng)擴(kuò)大,不美觀,而且成本增加。因此在這類儀表中,鍵盤設(shè)計(jì)成一鍵多義,一個(gè)鍵有多種功能。
在一鍵多義的情況下,一個(gè)命令不是由一次按鍵組成,而是由一個(gè)按鍵序列組成。也就是說,對一個(gè)按鍵含義的解釋,不僅取決于本次按鍵,還取決于以前按了些什么鍵。因此,對于一鍵多義的監(jiān)控程序,首先要判斷一個(gè)按鍵序列(而不是一次按鍵)是否已構(gòu)成一個(gè)合法命令。若已構(gòu)成合法命令,則執(zhí)行命令,否則等待新按鍵輸入。一鍵多義鍵盤管理程序,主要解決鍵盤按鍵序列的識別和如何根據(jù)鍵盤的按鍵序列去找相應(yīng)的操作程序這兩個(gè)問題。
上述問題可用“一圖三表”的方法來解決。即,建立一張鍵圖,依靠分析程序狀態(tài)表,分析程序入口表和動作例行子程序表來完成。其中分析程序狀態(tài)表總共分為4欄,分別為現(xiàn)狀態(tài)PSTi、鍵碼、下一狀態(tài)、動作例行子程序編號。
3 編碼開關(guān)工作原理
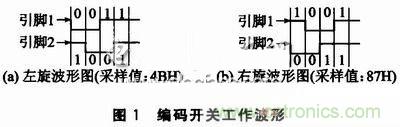
編碼開關(guān)有3個(gè)引腳和5個(gè)引腳的,其中2個(gè)引腳是按下功能,另外3個(gè)引腳控制編碼開關(guān)的左旋和右旋功能,與引腳1、2相連的是兩個(gè)長短不一的金屬靜片,與引腳3相連的是一周有12或24個(gè)齒的金屬動片。當(dāng)脈沖電位器旋轉(zhuǎn)時(shí)可出現(xiàn)4種狀態(tài):引腳3與引腳1相連,引腳3與引腳2及引腳1全相連,引腳3與引腳2 相連,引腳3與引腳2及引腳1全斷開。
在實(shí)際使用中,一般將引腳3接地作為數(shù)據(jù)輸入端。而引腳1、2作為數(shù)據(jù)輸出端與單片機(jī)I/0口相連。本設(shè)計(jì)中用到3個(gè)編碼開關(guān),其中一個(gè)將引腳1與單片機(jī)的P4.0相連,引腳2與單片機(jī)的P4.1相連。當(dāng)脈沖電位器左旋或右旋時(shí),P4.0和P4.1就會周期性地產(chǎn)生圖1所示的波形。如果是12點(diǎn)的脈沖電位器旋轉(zhuǎn)一圈就會產(chǎn)生12組這樣的波形,24點(diǎn)的脈沖電位器就會產(chǎn)生24組這樣的波形。一組波形(或一個(gè)周期)包含了4個(gè)工作狀態(tài)。因此只要檢測出P4.O 和P4.1的波形,就能識別脈沖電位器是否旋轉(zhuǎn),是左旋還是右旋。
4 C8051F020單片機(jī)ADC0
C8051F020的ADC0子系統(tǒng)包括:一個(gè)9通道的可配置模擬多路開關(guān)(AMUX0)、一個(gè)可編程增益放大器(PGA0)和一個(gè)100 ksps的12位分辨率的逐次逼近寄存器型ADC。ADC中集成了跟蹤保持電路和可編程窗口檢測器。AMUX0、PGA0、數(shù)據(jù)轉(zhuǎn)換方式及窗口檢測器都可用軟件通過特殊功能寄存器來配置。只有當(dāng)ADC0控制寄存器(ADCOCN)中的ADOEN位被置1時(shí),ADC子系統(tǒng)才被允許工作。當(dāng)ADOEN位為0 時(shí),ADC子系統(tǒng)處于低功耗關(guān)斷方式。
ADC0端口的每一對均可用編程設(shè)置成為單端輸入或差分輸入。差分輸入時(shí)的端口配對為(0,1)、(2,3)、(4,5)、(6,7),此設(shè)置由通道選擇寄存器AMUXOSL的低4位和通道配置寄存器AMUXOCF的低4位確定。在AMXOCF中,位3~O各對應(yīng)2個(gè)引腳通道。位值=0,表示是獨(dú)立的單端輸入(復(fù)位值均為單端輸入);位值=1,表示是差分輸入對。
C8051F系列單片機(jī)中ADC的速率都是可編程設(shè)置的,但最少要用16個(gè)系統(tǒng)時(shí)鐘。一般在轉(zhuǎn)換之前還自動加上3個(gè)系統(tǒng)時(shí)鐘的跟蹤/保持捕獲時(shí)間 (>1.5μs)。設(shè)置F020內(nèi)ADC速率的方法是通過配置寄存器ADCOCF的位7~3來進(jìn)行的,其復(fù)位值為11111(位 7~3=SYSCLK/CLK(SAR)-1)。
一般在啟動ADC之前都要處于跟蹤方式,控制寄存器ADCOCN的位6如果為“O”,則一直處于跟蹤方式(此時(shí)啟動4種啟動方式都可比跟蹤啟動快3個(gè)系統(tǒng)時(shí)鐘);如為“1”,則有4種跟蹤啟動方式可選擇,即對ADCOCN中的位3~2賦值:00為向ADBUSY寫1時(shí)跟蹤(軟件命令),01為定時(shí)器3溢出跟蹤,1O為CNVSTR上升沿跟蹤(外部信號),11為定時(shí)器2溢出跟蹤。
5 系統(tǒng)硬件電路設(shè)計(jì)
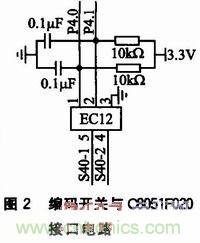
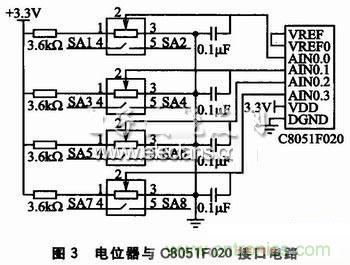
鍵盤部分采用6×6矩陣鍵盤,P7.O~P7.5為行線,P3.0~P3.5為列線。P3.0與P7.O交叉處為一鍵,P7口接10 kΩ的上拉電阻至3.3 V。3個(gè)編碼開關(guān)的1、2腳直接與單片機(jī)的I/0引腳相連,這里選擇P4.O~P4.5,3腳接地,4、5腳用作按鍵使用。僅以接P4.O和P4.1引腳的編碼開關(guān)為例,電路圖如圖2所示。模數(shù)轉(zhuǎn)換部分使用內(nèi)部電壓基準(zhǔn),故將VREF引腳與VREF0引腳相連即可。采用電位器調(diào)節(jié)模擬量的輸入,單端輸入,電位器阻值為10 kΩ,基準(zhǔn)電壓典型值為2.43 V,電源電壓采用3.3 V供電。為使基準(zhǔn)電壓達(dá)到最大,需要一個(gè)阻值約為3.58 kΩ的電阻與電位器串聯(lián)接到模擬端口,硬件電路如圖3所示,電位器的4、5腳也用作按鍵使用。
6 系統(tǒng)軟件設(shè)計(jì)
6.1 一鍵多義鍵盤程序設(shè)計(jì)
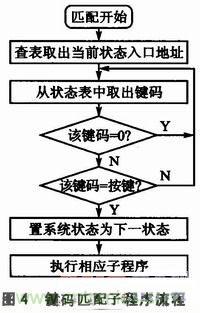
在鍵盤分析中,運(yùn)用一個(gè)工作狀態(tài)寄存器保存鍵盤的現(xiàn)狀態(tài),當(dāng)鍵盤掃描到一個(gè)按鍵時(shí),根據(jù)現(xiàn)狀態(tài)的值從分析程序入口表中找到分析程序狀態(tài)表地址,從該地址處進(jìn)入分析程序狀態(tài)表,找到相匹配的值,把下一狀態(tài)送到現(xiàn)狀態(tài)單元里,取出動作號,根據(jù)動作號計(jì)算出動作子程序入口地址,再執(zhí)行相應(yīng)子程序。圖4為鍵碼匹配子程序的流程圖。
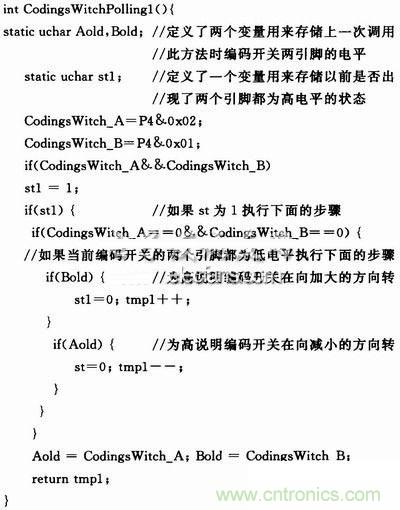
6. 2 編碼開關(guān)程序設(shè)計(jì)
由圖1可以看出,引腳1和引腳2有同時(shí)為高電平的情況,之后如果引腳2比引腳1先到達(dá)高電平則表示左旋,如果引腳1比引腳2先到達(dá)高電平則表示右旋。編程的時(shí)候依據(jù)這個(gè)特點(diǎn)來判斷引腳1、引腳2的狀態(tài)即可。以1引腳接P4.0,2引腳接P4.1為例:
6.3 模數(shù)轉(zhuǎn)換軟件設(shè)計(jì)
通過設(shè)置ADCO控制寄存器ADCOCN位3~2(ADOCM1~O)A/D轉(zhuǎn)換啟動方式選擇位,來啟動A/D轉(zhuǎn)換:位3~2為00時(shí),向ADOBUSY(ADCOCN位4)寫1啟動A/D轉(zhuǎn)換;位3~2為01時(shí),定時(shí)器3溢出啟動A/D轉(zhuǎn)換;位3~2為10時(shí),CNVSTR上升沿啟動 A/D轉(zhuǎn)換;位3~2為11時(shí),定時(shí)器2溢出啟動A/D轉(zhuǎn)換。本設(shè)計(jì)采用第一種啟動方式。
由于單片機(jī)的工作量并不大,所以軟件設(shè)計(jì)時(shí)采用查詢的方式。單片機(jī)不斷地查詢鍵盤、編碼開關(guān)以及電位器的狀態(tài),如果有變化時(shí),單片機(jī)將動作信息傳遞給 ARM主MCU,等待主MCU的處理。由于單片機(jī)模數(shù)轉(zhuǎn)換的速度非??欤虼嗽诔绦蛑屑友訒r(shí),以便觀察到模數(shù)轉(zhuǎn)換的變化量。另外,硬件設(shè)計(jì)時(shí)沒有考慮濾波,故用軟件實(shí)現(xiàn)濾波。一般的濾波的方法有限幅濾波法、中位置濾波法、算術(shù)平均濾波法等,現(xiàn)在提出一種新的濾波方法。由于使用12位A/D,但只要8位就可以達(dá)到所要的精度,所以可以采用去掉低4位的方法來實(shí)現(xiàn)濾波的目的。由于篇幅有限,下面只給出程序的一部分,以AIN0為例:
結(jié)語
本文介紹的一鍵多義的按鍵管理程序,對多按鍵的智能儀表可以通用。編碼開關(guān)的編程方法簡單易懂。在A/D轉(zhuǎn)換部分,提出的去掉低4位的軟件濾波方法可靠可行,對精度要求不高的場合非常適用。這3部分構(gòu)成了一個(gè)完整的監(jiān)控程序,當(dāng)單片機(jī)監(jiān)控到某一部分有變化時(shí),就將其動作信息傳遞給ARM主CPU,主CPU 進(jìn)行相應(yīng)的處理。
推薦閱讀:


