

【導(dǎo)讀】時(shí)鐘抖動(dòng)有幾種不同的類型和測量方法,以及相應(yīng)的規(guī)格指標(biāo),但大多數(shù)硬件設(shè)計(jì)人員沒有時(shí)間去研究這些,因?yàn)閷τ陔娐钒逶O(shè)計(jì)師而言,時(shí)鐘抖動(dòng)規(guī)格指標(biāo)的細(xì)微差別似乎是微不足道的瑣碎之事。那么如何去確定嵌入式設(shè)計(jì)可接受的抖動(dòng)水平?
設(shè)計(jì)師往往更把精力集中在眼前較重大的設(shè)計(jì)任務(wù),以優(yōu)先級順序這些是針對FPGA邏輯、微處理器綜合體、數(shù)據(jù)層面交換結(jié)構(gòu)、控制層面交換架構(gòu)、RF信號鏈路、電源、互連互通問題、設(shè)計(jì)仿真、建模等設(shè)計(jì)任務(wù)。
因此,設(shè)計(jì)人員必須假定來自各個(gè)芯片廠商的參考時(shí)鐘抖動(dòng)規(guī)格指標(biāo)與他們預(yù)期使用的這些器件相關(guān),并且這些規(guī)格指標(biāo)已經(jīng)被完全和正確地確定。
但如果沒有一些基本準(zhǔn)則可循,設(shè)計(jì)師可能會指定過高的時(shí)鐘抖動(dòng)要求,導(dǎo)致采用更昂貴的時(shí)鐘器件并增大不必要的物料成本(BOM)?;蛘叱霈F(xiàn)更糟糕的情況,針對某特定應(yīng)用,把時(shí)鐘抖動(dòng)要求降低,相應(yīng)的錯(cuò)誤可能會超出給定應(yīng)用可接受的誤差率水平。這種情況只能在產(chǎn)品開發(fā)周期后期在對最初原型板進(jìn)行性能指標(biāo)測試時(shí)才可以發(fā)現(xiàn),因此很可能會影響最終產(chǎn)品的發(fā)布時(shí)間。
最根本的檢查點(diǎn)
設(shè)計(jì)師要考慮的第一個(gè)也是最根本的檢查點(diǎn)是確定針對特定應(yīng)用最相關(guān)的時(shí)鐘抖動(dòng)類型。表1總結(jié)了根據(jù)應(yīng)用類型的一些抖動(dòng)分類,以及相應(yīng)的規(guī)格指標(biāo)限定。
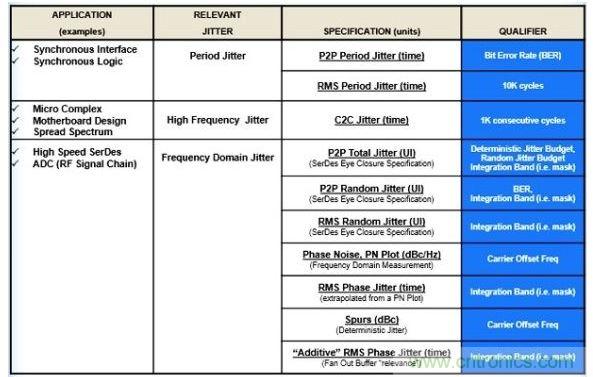
表1:與應(yīng)用相關(guān)的抖動(dòng)。
周期抖動(dòng)是可以最直觀理解的抖動(dòng)類型,它簡單地指與周期理想值(或平均值)的偏差,是同步接口和邏輯設(shè)計(jì)相關(guān)的抖動(dòng)類型,應(yīng)用案例包括與同步存儲器端接的微處理器接口,或FPGA內(nèi)部的同步狀態(tài)機(jī)設(shè)計(jì)。
隨著時(shí)鐘周期縮短或擴(kuò)大,可以對同步設(shè)計(jì)的建立時(shí)間或者保持時(shí)間產(chǎn)生巨大影響,這也是為什么周期抖動(dòng)與這些類型的應(yīng)用相關(guān)的原因。
高頻抖動(dòng),尤其是相鄰周期(C2C)抖動(dòng),是與擴(kuò)頻時(shí)鐘相關(guān)的抖動(dòng)類型。擴(kuò)頻時(shí)鐘有意誘發(fā)低頻抖動(dòng)來減輕電磁干擾(EMI),這些都是傳統(tǒng)上消費(fèi)電子產(chǎn)品所擔(dān)心的。但是,由于擴(kuò)頻是低頻率抖動(dòng),它不會影響相鄰周期抖動(dòng)測量。出于這個(gè)原因,相鄰周期抖動(dòng)規(guī)格指標(biāo)可用于量化擴(kuò)頻時(shí)鐘的抖動(dòng)性能。
仔細(xì)分析頻域抖動(dòng)
重要的是要特別注意頻域抖動(dòng)以及它在高速串行通信中的適用性。具體來說,針對高速串行/解串器(SerDes)設(shè)計(jì)的參考時(shí)鐘抖動(dòng)要求應(yīng)該詳盡。頻域抖動(dòng)是最不被理解的抖動(dòng)類型,因此也最容易導(dǎo)致出現(xiàn)一些常見的電路板設(shè)計(jì)缺陷。
圖1所示為一個(gè)通過頻譜分析儀生成的相位噪聲(PN)曲線,頻譜分析儀可捕獲時(shí)鐘信號的頻譜內(nèi)容,因此有助于了解時(shí)鐘抖動(dòng)的頻率特性。這對于說明相位擾動(dòng)的隨機(jī)性也很有幫助,相位擾動(dòng)的隨機(jī)性意味著隨機(jī)頻率擾動(dòng),并且這反過來又意味著隨機(jī)周期擾動(dòng)。
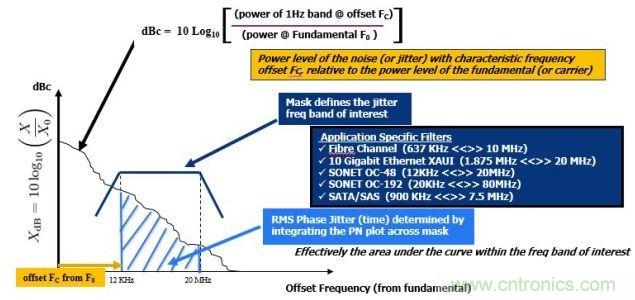
圖1:相位噪聲(PN)曲線常用來表示頻域中的時(shí)鐘抖動(dòng)。
因此,PN曲線代表的是隨機(jī)時(shí)鐘周期抖動(dòng),但是在頻域。從數(shù)學(xué)上看,它是時(shí)鐘信號的噪聲(即抖動(dòng))相對于在特定基頻頻率偏差下的時(shí)鐘基頻F0的強(qiáng)度。
在特定頻率偏差下的抖動(dòng)強(qiáng)度可以表明該抖動(dòng)值多長時(shí)間發(fā)生一次,因此一個(gè)PN曲線表明一個(gè)特定的隨機(jī)頻率偏差多長時(shí)間發(fā)生一次。抖動(dòng)強(qiáng)度與載波的比值以dBc/Hz表示,dBc/Hz值越低越好,意味著更小的抖動(dòng)強(qiáng)度。
均方根(RMS)相位抖動(dòng)是由PN曲線外推得到的抖動(dòng)量化值,它不能與時(shí)域抖動(dòng)規(guī)格指標(biāo)的RMS周期抖動(dòng)混淆。轉(zhuǎn)換的RMS相位抖動(dòng)值在很大程度上是一個(gè)積分函數(shù),其值取決于根據(jù)該P(yáng)N曲線下的區(qū)域面積。
[page]
但是這個(gè)面積需要由一個(gè)積分區(qū)間來界定,或者被通常稱為“遮罩(Mask)”。Mask是與特定應(yīng)用的傳遞函數(shù)而相關(guān)聯(lián),其目的是限制或阻止抖動(dòng)量化值在一個(gè)頻率范圍內(nèi),該應(yīng)用的傳遞函數(shù)不再進(jìn)行過濾。這意味著,任何RMS相位抖動(dòng)要求必須由所關(guān)注的積分范圍限定。
一個(gè)PN曲線,以及相應(yīng)的RMS相位抖動(dòng)量化值,是串行/解串器(SerDes)應(yīng)用相關(guān)的時(shí)鐘抖動(dòng)類型。同步數(shù)字體系(SDH)、同步光纖網(wǎng)絡(luò)(SONET)、以太網(wǎng)、PCI Express(PCIe)、串行RapidIO(SRIO)和SMPTE(美國電影電視工程師協(xié)會)等工業(yè)串行標(biāo)準(zhǔn)都利用這種時(shí)鐘抖動(dòng)類型用于界定必要的參考時(shí)鐘抖動(dòng)。
作為參考,一個(gè)具有代表性的SerDes通信信道如圖2所示。鎖相環(huán)(PLL)是輸入時(shí)鐘抖動(dòng)固有的低通濾波器,這樣, 發(fā)射器(Tx)的SerDes時(shí)鐘倍增單元(CMU)PLL用作參考時(shí)鐘抖動(dòng)的低通濾波器。
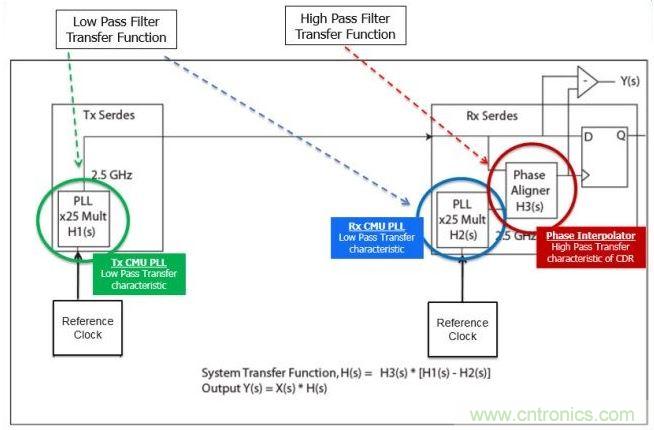
圖2:一個(gè)具有代表性的高速串行通信信道。
此時(shí)鐘的高頻抖動(dòng)不被轉(zhuǎn)移到該P(yáng)LL的輸出,因此,不會對SerDes的輸出抖動(dòng)產(chǎn)生任何影響。這個(gè)Tx CMU鎖相環(huán)的低通濾波器特征確定了所感興趣積分頻帶的上限轉(zhuǎn)角頻率(corner frequency)。
以類似的方式,用于接收器SerDes參考時(shí)鐘由內(nèi)部接收器SerDes CMU鎖相環(huán)倍乘。該時(shí)鐘然后用于基于相位內(nèi)插器的時(shí)鐘和數(shù)據(jù)恢復(fù)(CDR)電路,其可作為參考時(shí)鐘抖動(dòng)的高通濾波器。
因此,這個(gè)時(shí)鐘的低頻抖動(dòng)不會傳遞到用于CDR的相位對準(zhǔn)器輸出。接收器相位內(nèi)插器的高通濾波器特征確定了感興趣積分頻帶的下限轉(zhuǎn)角頻率。
所有這些效應(yīng)會界定具體串行標(biāo)準(zhǔn)的SerDes傳遞函數(shù),以及那些確定感興趣的頻帶或者M(jìn)ask,例如用于10G以太網(wǎng)的1.875MHz到20MHz的頻帶。
芯片廠商的規(guī)格指標(biāo)并不一致
除了許多不同的抖動(dòng)類型和細(xì)微差別,芯片制造商如何為他們的器件確定所需的時(shí)鐘抖動(dòng)也有很多的不確定性。 SerDes芯片廠商為他們的元件確定所需的參考時(shí)鐘抖動(dòng),但是物理層、FPGA和處理器等器件規(guī)格指標(biāo)則不一定與行業(yè)串行接口標(biāo)準(zhǔn)的方法學(xué)和測量細(xì)節(jié)等保持一致。
例如,大部分網(wǎng)絡(luò)通信標(biāo)準(zhǔn)(如千兆以太網(wǎng),10千兆以太網(wǎng)等)指定峰-峰(P2P)值總抖動(dòng)作為一個(gè)單位間隔(UI)的百分比,其中一個(gè)UI在給定串行標(biāo)準(zhǔn)中相當(dāng)于時(shí)間域1比特間隔。但是峰-峰值總抖動(dòng)UI實(shí)際上是一個(gè)SerDes眼圖關(guān)閉(eye closure)規(guī)格指標(biāo),以符合可接受的比特誤碼率(BER),根據(jù)工業(yè)串行標(biāo)準(zhǔn)其通常是10-12。
這些標(biāo)準(zhǔn)并沒有界定總抖動(dòng)UI預(yù)算有多少被分配給互連、光學(xué)、串行解串器,或驅(qū)動(dòng)SerDes的參考時(shí)鐘。其結(jié)果是,電路板設(shè)計(jì)人員只能聽命于芯片供應(yīng)商以及在他們的數(shù)據(jù)表中規(guī)定的參考時(shí)鐘抖動(dòng)。通常,這些規(guī)格指標(biāo)都過于保守,把大多數(shù)抖動(dòng)預(yù)算給予了集成的SerDes,為需要驅(qū)動(dòng)SerDes的參考時(shí)鐘只留下少許。
使問題更加復(fù)雜的是,來自時(shí)鐘芯片廠商的抖動(dòng)規(guī)格指標(biāo)可能是模糊的,也不一定完整。一些供應(yīng)商對于時(shí)鐘產(chǎn)品的描述(specmanship)建立在不適當(dāng)規(guī)格指標(biāo)和測量結(jié)果基礎(chǔ)上,通常不適合于目標(biāo)應(yīng)用,對于給定的規(guī)格指標(biāo)會產(chǎn)生不一致并缺失關(guān)鍵的限定。
常見的抖動(dòng)陷阱
對于電路板設(shè)計(jì)人員來說,有許多容易導(dǎo)致錯(cuò)誤的陷阱。本節(jié)會擴(kuò)展來討論一些下面列出的常見陷阱的更多詳細(xì)信息:
*P2P隨機(jī)抖動(dòng)規(guī)格指標(biāo)沒有針對目標(biāo)應(yīng)用BER限定
*把針對通信應(yīng)用而設(shè)計(jì)的時(shí)鐘抖動(dòng)規(guī)格指標(biāo)和方法學(xué)應(yīng)用于PCIe端口
*PN曲線生成時(shí)關(guān)斷雜散波以便滿足總相位抖動(dòng)要求( 通過使用隨機(jī)RMS相位抖動(dòng)測量忽略了確定性抖動(dòng))
*抖動(dòng)的測量/確定僅僅是針對器件,而不是針對給定應(yīng)用(如整數(shù)模式下的w/內(nèi)置 MultiSynth分頻器)的案例配置
*添加RMS相位抖動(dòng)(Additive RMS phase jitter)的測量作為輸入和輸出抖動(dòng)之間的簡單差值,而不是輸入和輸出抖動(dòng)平方差的平方根值
例如,圖3所示隨機(jī)周期抖動(dòng)的高斯分布裙邊會無限延伸下去,這是因?yàn)殡S機(jī)抖動(dòng)沒有邊界,因此,實(shí)際測量P2P周期抖動(dòng)絕對最大值并不現(xiàn)實(shí)。然而,在高斯分布上超過一個(gè)點(diǎn)的抖動(dòng)可以給定一個(gè)概率。 BER依特定應(yīng)用而定,并且通常用于此目的。
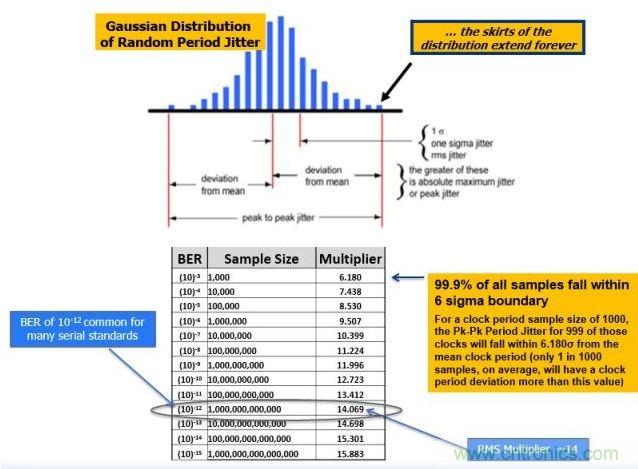
圖3:隨機(jī)周期抖動(dòng)的高斯分布裙邊無限延伸。
沒有芯片供應(yīng)商提供的可接受的BER,P2P周期抖動(dòng)規(guī)格指標(biāo)毫無意義。然而,這個(gè)限定往往難以從器件的數(shù)據(jù)表中看到。對于給定的應(yīng)用,如果已知道可接受的BER,該給定應(yīng)用的RMS周期抖動(dòng)之后可以計(jì)算出來。所以,重要的是設(shè)計(jì)者必須要知道他們應(yīng)用的正確BER。此外,請注意這種方法不是針對于周期抖動(dòng),因?yàn)樗捎糜谟?jì)算各種類型的RMS抖動(dòng)。作為例子,一個(gè)RMS相位抖動(dòng)的計(jì)算如下所示:
[page]
考慮到10GE PHY需要的隨機(jī)相位抖動(dòng)UI=0.18 UI
... 因?yàn)楸忍芈适?0.3125Gbps,1 UI=96.9pS
...假定給定應(yīng)用可接受的BER是10-12
那么,所需的相應(yīng)RMS相位抖動(dòng)的計(jì)算公式為:
[(0.18)*(96.9pS)]÷(14.069) = 1.24pS
PCIe已經(jīng)成為通信應(yīng)用普遍的控制層面接口,以太網(wǎng)物理層等器件集成PCIe端口用于連接帶外的控制層面微處理器(micro)。至少一個(gè)著名的以太網(wǎng)PHY廠商已經(jīng)為他們的PCIe參考時(shí)鐘確定RMS相位抖動(dòng),其方式類似于在同樣器件中他們?yōu)橐蕴W(wǎng)端口確定RMS相位抖動(dòng),通過由頻譜分析儀所產(chǎn)生的相位噪聲曲線進(jìn)行有效地外延。但是,這種方式不符合PCIe標(biāo)準(zhǔn)抖動(dòng)方法,如圖4中可詳細(xì)說明。
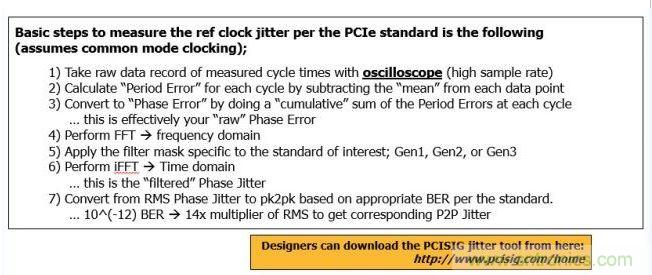
圖4: 針對PCIe標(biāo)準(zhǔn)測量參考時(shí)鐘抖動(dòng)的7個(gè)步驟。
按照PCIe標(biāo)準(zhǔn)測量參考時(shí)鐘抖動(dòng)的基本步驟如下:
(假定為常見模式時(shí)鐘)
1) 用示波器(高取樣率)得到所測周期時(shí)間的初始數(shù)據(jù)記錄
2) 通過每個(gè)數(shù)據(jù)點(diǎn)減去平均值來計(jì)算針對每個(gè)周期的‘周期誤差’
3) 通過對每個(gè)周期的周期誤差進(jìn)行累積求和,從而轉(zhuǎn)化為‘相位誤差’
……得到您的有效‘初始’相位誤差
4) 通過快速傅里葉變換(FFT)轉(zhuǎn)變到頻域
5) 把特定的遮罩(mask)應(yīng)用于感興趣的標(biāo)準(zhǔn),Gen1,Gen2,或者Gen3
6) 進(jìn)行快速傅里葉逆變換(iFFT)操作再變換到時(shí)域
……得到‘過濾的’相位誤差
7) 根據(jù)適當(dāng)?shù)臉?biāo)準(zhǔn)誤碼率(BER)要求把RMS相位抖動(dòng)轉(zhuǎn)換為峰值到峰值抖動(dòng)
……10-12誤碼率,通過RMS的14X乘法器得到相應(yīng)的峰值到峰值抖動(dòng)
相反,PCIe方法是采用示波器測量得到的原始周期樣本,然后應(yīng)用FFT、濾波器和iFFT步驟來得出適當(dāng)?shù)腞MS相位抖動(dòng)測量。重要的是要注意到這兩種不同的方法可以產(chǎn)生完全不同的結(jié)果。
因此,設(shè)計(jì)人員可能會誤認(rèn)為設(shè)計(jì)的時(shí)鐘器件達(dá)到或超過了PCIe參考時(shí)鐘抖動(dòng)規(guī)格指標(biāo)或者標(biāo)準(zhǔn),但是這些器件卻不足以驅(qū)動(dòng)PCIe端口,原因是這些PHY廠家采用了不同的方法和/或過濾器來確定所需的參考時(shí)鐘抖動(dòng)。
如先前所討論的,P2P總抖動(dòng)(UI)是特定于SerDes的數(shù)據(jù)信號。這包括確定性和隨機(jī)抖動(dòng)對于數(shù)據(jù)信號眼圖的貢獻(xiàn)。人們普遍認(rèn)為,在SerDes鏈路的確定性抖動(dòng)很大程度上與鏈路本身和其他系統(tǒng)障礙有關(guān)。
隨機(jī)抖動(dòng)主要可歸因于SerDes外部參考時(shí)鐘和SerDes內(nèi)部的PLL。但我們知道,參考時(shí)鐘也具有一定量的確定性抖動(dòng)。此外,許多PHY供應(yīng)商的數(shù)據(jù)表并沒有區(qū)分列出驅(qū)動(dòng)他們SerDes參考時(shí)鐘的隨機(jī)與確定性抖動(dòng)要求。由于這些原因,另一種常見的設(shè)計(jì)陷阱是使用PN曲線來量化時(shí)鐘器件的總相位抖動(dòng),其中包括確定性抖動(dòng),但雜散被關(guān)斷 (雜散是“周期性雜散噪聲”的簡寫,代表了時(shí)鐘的確定性抖動(dòng))。此確定性抖動(dòng)可來源于電路板設(shè)計(jì)本身和/或時(shí)鐘芯片,串?dāng)_、電磁干擾(EMI)、開關(guān)電源噪聲、和PLL小數(shù)反饋分頻器都可以是這種確定性抖動(dòng)的來源。
對于圖5中所示的PN曲線例子,其特殊的電路板設(shè)計(jì)使在PLL輸出端測得顯著的雜散內(nèi)容。不幸的是,這些雜散噪聲處在該應(yīng)用感興趣的12kHz至20MHz積分范圍內(nèi)。因此,參考時(shí)鐘的總相位抖動(dòng)已經(jīng)超出了SerDes芯片供應(yīng)商的規(guī)格指標(biāo),結(jié)果是較高的BER。采用EMI嗅探器(sniffer)分析這些問題的根本原因,發(fā)現(xiàn)這種雜散的內(nèi)容可追溯到用于給PLL供電的同步降壓開關(guān)穩(wěn)壓器,通過電路板布局修改和無源元件的變化可以減輕這一問題。
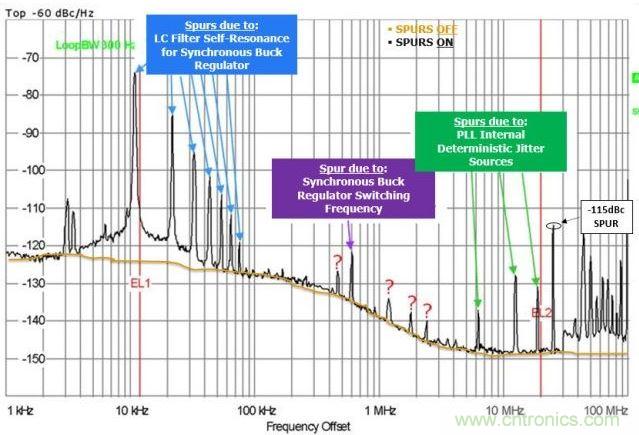
圖5:具有雜散噪聲的 PN曲線示例。
然而,某些雜散內(nèi)容來自PLL時(shí)鐘器件本身。重要的是要記住,任何時(shí)鐘合成器可以產(chǎn)生許多不需要的和與差頻率,它們的強(qiáng)度可能很大足以顯著出現(xiàn)在PN曲線上。
當(dāng)今優(yōu)秀的PLL設(shè)計(jì)都采用先進(jìn)的硅設(shè)計(jì)技術(shù)。這些進(jìn)展有助于減少內(nèi)在產(chǎn)生的隨機(jī)和確定性(雜散)抖動(dòng)。但對于抖動(dòng)關(guān)鍵的板載時(shí)鐘,設(shè)計(jì)師需要義不容辭地與定時(shí)器件廠商驗(yàn)證給定的時(shí)鐘器件其相應(yīng)的相位抖動(dòng)規(guī)格指標(biāo)是基于雜散導(dǎo)通時(shí)得到的PN曲線。
[page]
一個(gè)流程圖讓你步入正軌
圖6中所示的流程圖旨在針對具體應(yīng)用把電路板設(shè)計(jì)人員引導(dǎo)到正確的抖動(dòng)規(guī)格指標(biāo),從而正確地選擇時(shí)鐘芯片。
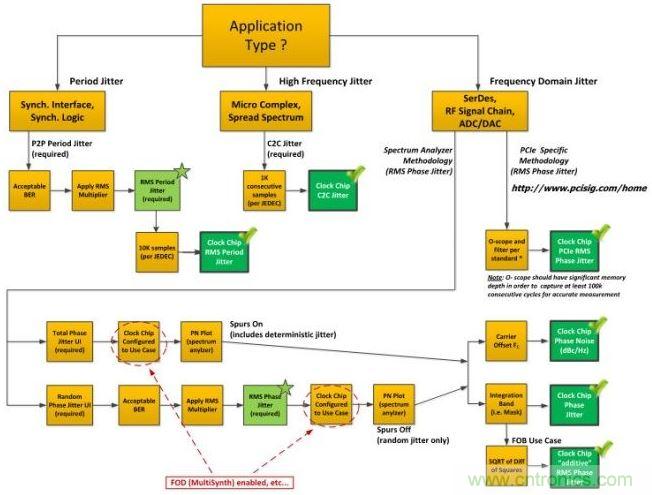
圖6:流程圖有助于針對您的應(yīng)用來確定正確的抖動(dòng)。
首先要確定應(yīng)用類型。它是一個(gè)同步接口或同步邏輯設(shè)計(jì)、一個(gè)微處理器參考時(shí)鐘規(guī)格指標(biāo)或擴(kuò)頻時(shí)鐘、一個(gè)高速串行通信或串行/解串器設(shè)計(jì)?在許多電路板設(shè)計(jì)中,往往所有這些應(yīng)用類型都需要進(jìn)行處理,而且它們都有不同的抖動(dòng)要求。
對于同步接口或同步邏輯設(shè)計(jì),所涉及的應(yīng)該是周期抖動(dòng)。你是從P2P周期抖動(dòng)規(guī)格指標(biāo)開始工作嗎?如果是這樣,那么你需要確定兩個(gè)關(guān)鍵限定:首先,按照J(rèn)EDEC(電子器件工程聯(lián)合委員會),你在使用的芯片P2P周期抖動(dòng)是基于10K樣本大小。其次,芯片供應(yīng)商為您提供針對他們規(guī)格指標(biāo)的假定BER。有了這兩個(gè)限定,就可以得出一個(gè)相應(yīng)的RMS周期抖動(dòng)規(guī)格指標(biāo)以便選擇適當(dāng)?shù)臅r(shí)鐘器件。
如果它是一個(gè)消費(fèi)類電子產(chǎn)品的應(yīng)用來實(shí)現(xiàn)擴(kuò)頻,那么你可能需要使用相鄰周期抖動(dòng)規(guī)格指標(biāo)。按照J(rèn)EDEC標(biāo)準(zhǔn),假定相鄰周期抖動(dòng)是在跨越連續(xù)1000個(gè)周期進(jìn)行測定。你需要確認(rèn)是不是這種情況,之后你會有一個(gè)有效的相鄰周期抖動(dòng)規(guī)格指標(biāo)來確定相應(yīng)的時(shí)鐘芯片。
如果它是一個(gè)高速串行通信設(shè)計(jì),那么你應(yīng)該首先詢問是否串行標(biāo)準(zhǔn)采用了傳統(tǒng)的擴(kuò)展頻譜分析儀方法來量化相位噪聲。此外,重要的是要注意PHY廠商針對規(guī)格指標(biāo)到底提供了什么,是P2P總抖動(dòng)UI,還是P2P隨機(jī)抖動(dòng)UI?
需要記住的是RMS只針對于隨機(jī)抖動(dòng),需要將隨機(jī)抖動(dòng)要求被BER乘數(shù)相除以便得到相應(yīng)的RMS隨機(jī)抖動(dòng)UI。對于隨機(jī)抖動(dòng),你可以使用一個(gè)關(guān)斷雜散的PN曲線,通過積分得到RMS相位抖動(dòng)值。但是,如果采用一個(gè)接通雜散的PN曲線來得到確定性抖動(dòng),然后在Mask積分,那么得到的相應(yīng)值不再是RMS,而是總的相位抖動(dòng)。
該流程圖的目的是針對您的應(yīng)用引導(dǎo)您通過一個(gè)系統(tǒng)化的途徑來確定正確的抖動(dòng),流程的設(shè)計(jì)是專門用來避免在本文中詳細(xì)介紹的常見電路板設(shè)計(jì)陷阱。
一個(gè)有用的時(shí)鐘器件規(guī)格指標(biāo)應(yīng)該能夠描繪出不同的輸出結(jié)構(gòu)和每個(gè)結(jié)構(gòu)的相應(yīng)抖動(dòng)能力,它還可以針對本文中介紹的不同抖動(dòng)類型提供規(guī)格指標(biāo),使設(shè)計(jì)人員可以為他們的特定應(yīng)用做好限定。作為一個(gè)例子,可以考慮圖7中所示的通用頻率轉(zhuǎn)換器(UFT)。
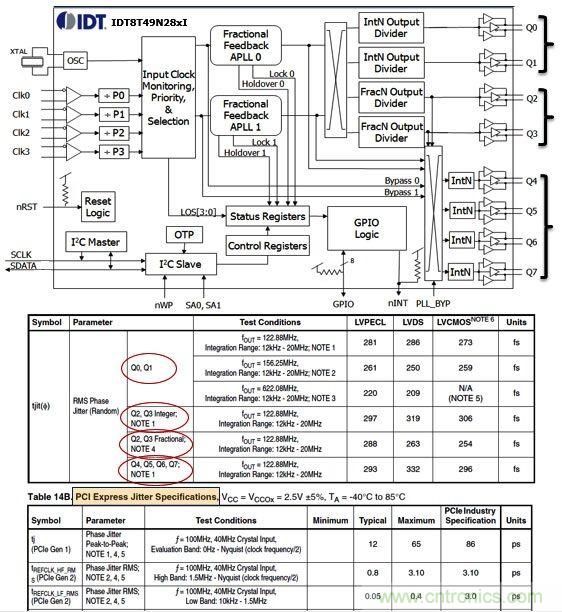
圖7:IDT8T49N28X通用頻率轉(zhuǎn)換器。
這種可配置的時(shí)鐘器件有幾個(gè)先進(jìn)的功能,非常適合于通信線路卡(line-card)應(yīng)用。它能夠以單一器件提供令人印象深刻的高性能(例如低相位噪聲)和靈活性。為了實(shí)現(xiàn)這種靈活性,該器件采用了一種混合有基于整數(shù)和分?jǐn)?shù)的輸出分頻器,具有為每個(gè)輸出類型對應(yīng)的RMS相位抖動(dòng)差值,詳見本器件規(guī)格指標(biāo)。此外,該器件的數(shù)據(jù)表按照之前提到的PCISIG方法學(xué),以一個(gè)單獨(dú)的表格突出了PCIe相位抖動(dòng)性能,從而注意到了該串行接口標(biāo)準(zhǔn)中方法學(xué)的差異。
重要的是要認(rèn)識到,一個(gè)可配置時(shí)鐘數(shù)據(jù)表并不能夠覆蓋所有的應(yīng)用案例情況。因此,鼓勵(lì)設(shè)計(jì)人員針對特定的應(yīng)用案例去尋求相應(yīng)的抖動(dòng)性能,因?yàn)槠浣Y(jié)果可能略有不同。


