

【導(dǎo)讀】多方跨界入局智能汽車,推動(dòng)自動(dòng)駕駛快速發(fā)展??v觀各大車企的推進(jìn)節(jié)奏,寶馬、特斯拉、大眾、福特、一汽、上汽、蔚來(lái)等,均已計(jì)劃自2021年開(kāi)始布局L3及以上高階自動(dòng)駕駛,L3級(jí)自動(dòng)駕駛升級(jí)的元年已經(jīng)到來(lái)。
OEM、tier 1、測(cè)試測(cè)量公司等生態(tài)圈廠商布局逐漸完善,在EEVIA第九屆年度中國(guó)電子ICT媒體論壇暨2021產(chǎn)業(yè)和技術(shù)展望研討會(huì)上,NI資深汽車行業(yè)客戶經(jīng)理郭堉深入分析了自動(dòng)駕駛測(cè)試的挑戰(zhàn),并解釋了NI如何憑借多年在汽車測(cè)試領(lǐng)域的積累及“一個(gè)平臺(tái)戰(zhàn)略”構(gòu)建自動(dòng)駕駛測(cè)試閉環(huán)。

NI資深汽車行業(yè)客戶經(jīng)理郭堉
自動(dòng)駕駛的發(fā)展趨勢(shì)對(duì)測(cè)試提出的四大挑戰(zhàn)
隨著自動(dòng)駕駛邁進(jìn)更高階等級(jí),自動(dòng)駕駛平臺(tái)將接替人的大腦進(jìn)行駕駛決策,對(duì)算法和AI的能力要求明顯提升,通過(guò)不斷優(yōu)化ADAS的算法,更好地識(shí)別目標(biāo)物,從而提升自動(dòng)駕駛汽車的安全性。自動(dòng)駕駛產(chǎn)業(yè)的發(fā)展趨勢(shì)不僅于此,為應(yīng)對(duì)海量數(shù)據(jù)處理的需求,電子電氣結(jié)構(gòu)也在發(fā)生變化,從原來(lái)的傳感器都有ECU,到后續(xù)都用中央域控制器進(jìn)行處理。而“軟件定義汽車”理念的普及,意味著軟件將深度參與到汽車開(kāi)發(fā)驗(yàn)證中。此外,當(dāng)前的現(xiàn)狀是,自動(dòng)駕駛相關(guān)法規(guī)不完善,各家廠商的場(chǎng)景庫(kù)也不夠完善。
自動(dòng)駕駛產(chǎn)業(yè)的這些趨勢(shì)對(duì)汽車測(cè)試的影響體現(xiàn)在四個(gè)方面:
第一,由于被測(cè)件數(shù)量及集成度的增加,測(cè)試復(fù)雜度隨之增加。
第二,隨著毫米波、5G等新技術(shù)的不斷引入,傳感器數(shù)量的不斷增加,對(duì)測(cè)試系統(tǒng)的開(kāi)放性和靈活性有更高的要求。
第三,市場(chǎng)迭代加快,測(cè)試時(shí)間被壓縮。
第四,隨著整車功能的不斷完善,系統(tǒng)復(fù)雜度越來(lái)越高,測(cè)試復(fù)雜度及成本隨之增加,但整車價(jià)格卻不斷下降,倒逼整車廠和tier 1改變傳統(tǒng)的測(cè)試策略以達(dá)到預(yù)期的盈利目標(biāo)。
下圖是行業(yè)通用的汽車V字型開(kāi)發(fā)流程,郭堉分析道,越靠近右邊即產(chǎn)品階段的測(cè)試,測(cè)試成本越高。以前的測(cè)試策略是把更多精力投入到右邊的測(cè)試環(huán)節(jié),但是隨著自動(dòng)駕駛等級(jí)向更高級(jí)別邁進(jìn),隨之出現(xiàn)的軟件定義汽車、多傳感器融合等技術(shù)提高了系統(tǒng)的復(fù)雜度,均促進(jìn)研發(fā)者改變測(cè)試策略,更需要的是測(cè)試重心向左移,在設(shè)計(jì)研發(fā)的初始階段比如軟件階段就需要進(jìn)行大量的測(cè)試。
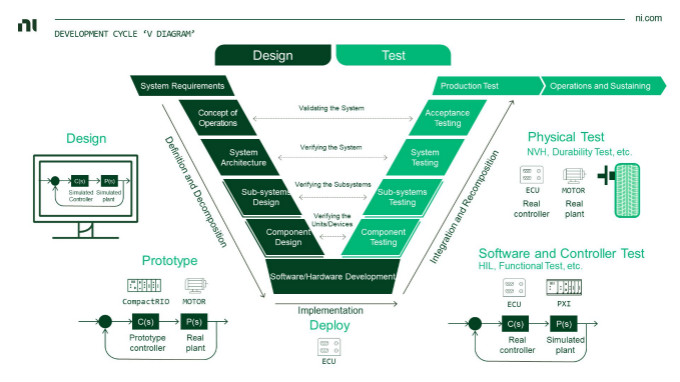
汽車V字型開(kāi)發(fā)流程
左邊是設(shè)計(jì)階段,右邊是測(cè)試階段
monoDrive助力搭建仿真測(cè)試階梯,為自動(dòng)駕駛測(cè)試降本增效
自動(dòng)駕駛測(cè)試大致可以分為三大部分:道路信息、傳感器數(shù)據(jù)采集;數(shù)字孿生與仿真測(cè)試;硬件在環(huán)HIL。
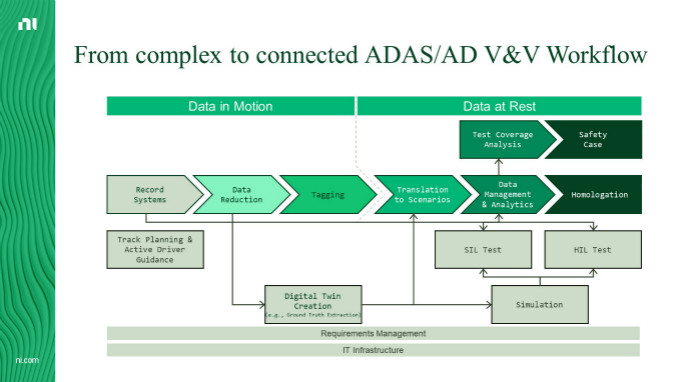
ADAS測(cè)試流程
(一)道路數(shù)據(jù)采集的關(guān)鍵在于同步
ADAS測(cè)試工程師需要在路測(cè)期間記錄原始傳感器數(shù)據(jù),以驗(yàn)證傳感器功能并訓(xùn)練在ECU上運(yùn)行的自動(dòng)駕駛汽車算法。為了保證行車安全,汽車上集成了越來(lái)越多的傳感器,導(dǎo)致汽車上的數(shù)據(jù)傳輸速率和數(shù)據(jù)記錄量呈指數(shù)級(jí)增長(zhǎng),記錄這些巨量數(shù)據(jù)需要進(jìn)行精確的同步,這樣再回放的時(shí)候才能讓ECU得到跟真實(shí)世界完全相同的數(shù)據(jù)情況,從而便于驗(yàn)證決策的準(zhǔn)確性。
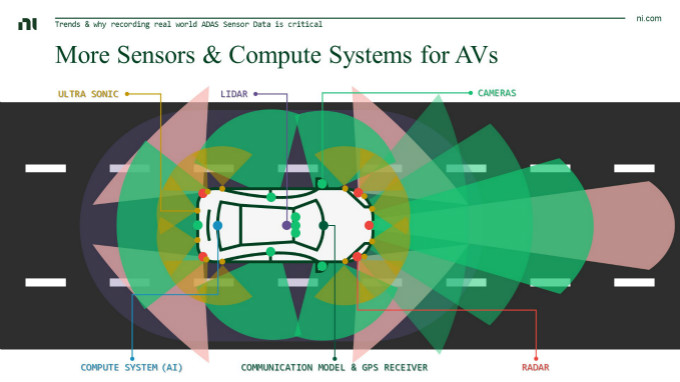
汽車中集成的傳感器
不同顏色的原點(diǎn)代表不同的傳感器,扇形代表對(duì)應(yīng)傳感器的視角
郭堉表示:“提高數(shù)據(jù)記錄質(zhì)量是降低整個(gè)測(cè)試成本的關(guān)鍵抓手,NI推出了基于PXI平臺(tái)的ADAS數(shù)據(jù)記錄系統(tǒng)(ADAS record system),PXI的機(jī)箱背板上有一條非常精確的同步總線,可以實(shí)現(xiàn)各個(gè)儀器間的精確同步。NI的ADAS數(shù)據(jù)記錄系統(tǒng)能解決兩大問(wèn)題:一是不斷增多的傳感器帶來(lái)的高帶寬要求,二是不同傳感器之間的精確同步。”
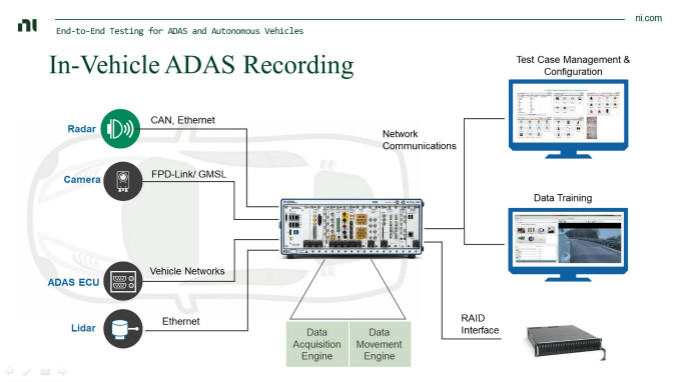
NI ADAS數(shù)據(jù)記錄系統(tǒng)
(二)虛擬仿真測(cè)試成潮流,用數(shù)字孿生重構(gòu)一個(gè)高保真度的場(chǎng)景
自動(dòng)駕駛領(lǐng)域的領(lǐng)先公司W(wǎng)aymo每天要做2000萬(wàn)英里的虛擬測(cè)試,至今為止,總共做了超過(guò)150億英里的測(cè)試,但是在真實(shí)道路上的路測(cè)只有2000萬(wàn)英里。通過(guò)數(shù)據(jù)對(duì)比可以看出,虛擬測(cè)試占比高達(dá)約99.9%。
虛擬仿真測(cè)試能夠有效對(duì)危險(xiǎn)或不常見(jiàn)的駕駛場(chǎng)景進(jìn)行測(cè)試,由于本身的靈活性優(yōu)勢(shì),使虛擬測(cè)試在自動(dòng)駕駛技術(shù)開(kāi)發(fā)中發(fā)揮著重要作用。正如郭堉所說(shuō),仿真測(cè)試將成為自動(dòng)駕駛測(cè)試的新趨勢(shì)。
數(shù)字孿生技術(shù)是建立虛擬場(chǎng)景庫(kù)的利器,數(shù)字孿生指的是把真實(shí)的場(chǎng)景一比一的放在虛擬環(huán)境中,生成一個(gè)孿生系統(tǒng)。NI 近期收購(gòu)了自動(dòng)駕駛汽車開(kāi)發(fā)的超高保真仿真軟件的領(lǐng)導(dǎo)者monoDrive,利用monoDrive工具進(jìn)行數(shù)字孿生,重構(gòu)一個(gè)高保真度的場(chǎng)景。monoDrive可以把真實(shí)駕駛環(huán)境中的樹(shù)葉、欄桿、地面上的標(biāo)志圖形完整地復(fù)現(xiàn)出來(lái),甚至包括天氣和路面積水情況,還原度非常高。
郭堉指出:“對(duì)于車輛在實(shí)際道路上錄制的所有場(chǎng)景數(shù)據(jù),我們可以通過(guò)monoDrive的Real-to-Virtual技術(shù)進(jìn)行數(shù)據(jù)重構(gòu)和孿生。我們需要這樣一個(gè)套件,快速地創(chuàng)建駕駛場(chǎng)景,這樣才可以快速地迭代ADAS的算法。”
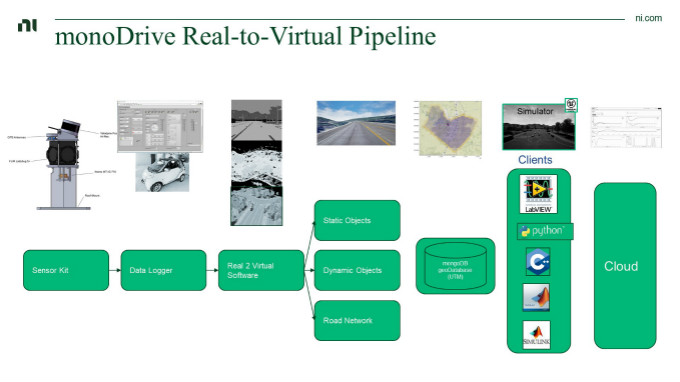
利用monoDrive工具進(jìn)行數(shù)據(jù)重構(gòu)與孿生
(三)硬件在環(huán)HIL進(jìn)一步加持
硬件在環(huán)HIL仿真技術(shù)可以使用NI PXI實(shí)時(shí)控制器運(yùn)行仿真模型來(lái)模擬受控對(duì)象的運(yùn)行狀態(tài),配合NI FPGA模塊可適應(yīng)更高動(dòng)態(tài)特性及更高精度的模型應(yīng)用需求。NI硬件在環(huán)測(cè)試平臺(tái)具有開(kāi)放的軟硬件技術(shù)架構(gòu),可以減少工程師的開(kāi)發(fā)時(shí)間、成本和風(fēng)險(xiǎn)。
自動(dòng)駕駛測(cè)試道路場(chǎng)景可總結(jié)為:純仿真的實(shí)驗(yàn)、通過(guò)錄制下來(lái)的數(shù)據(jù)進(jìn)行開(kāi)環(huán)的回放、硬件在環(huán)的仿真、道路測(cè)試。這些都可以用基于PXI的統(tǒng)一測(cè)試平臺(tái)戰(zhàn)略來(lái)應(yīng)對(duì),該方案的優(yōu)勢(shì)在于基于PXI總線的解決方案,可以同時(shí)模擬不同類型的傳感器信號(hào),增加I/O的覆蓋范圍。NI統(tǒng)一的平臺(tái)化方案將大大提高自動(dòng)駕駛測(cè)試迭代的速度和降低升級(jí)換代成本。
推薦閱讀:




