
【導(dǎo)讀】1904年,雷達(dá)首次被Christian Huelsmeyer用于探測(cè)船只,已有一個(gè)多世紀(jì)的歷史。常見的應(yīng)用是軍事雷達(dá)、民用航空交通管制,當(dāng)然,還有針對(duì)私家車輛的測(cè)速點(diǎn)。但是現(xiàn)在存在一種誤解,認(rèn)為這項(xiàng)技術(shù)已經(jīng)成熟,該領(lǐng)域幾乎沒有什么發(fā)展。成像雷達(dá)和協(xié)同雷達(dá)都在進(jìn)行著顛覆性的新創(chuàng)新。ADI公司(ADI)如何在汽車領(lǐng)域應(yīng)用中實(shí)現(xiàn)雷達(dá)并引入獨(dú)特的軟件和算法正是其特殊之處。
祖母時(shí)代的技術(shù)已成往事
1904年,雷達(dá)首次被Christian Huelsmeyer用于探測(cè)船只,已有一個(gè)多世紀(jì)的歷史。常見的應(yīng)用是軍事雷達(dá)、民用航空交通管制,當(dāng)然,還有針對(duì)私家車輛的測(cè)速點(diǎn)。但是現(xiàn)在存在一種誤解,認(rèn)為這項(xiàng)技術(shù)已經(jīng)成熟,該領(lǐng)域幾乎沒有什么發(fā)展。成像雷達(dá)和協(xié)同雷達(dá)都在進(jìn)行著顛覆性的新創(chuàng)新。ADI公司(ADI)如何在汽車領(lǐng)域應(yīng)用中實(shí)現(xiàn)雷達(dá)并引入獨(dú)特的軟件和算法正是其特殊之處。
過去25年里,ADI一直活躍在汽車行業(yè),其產(chǎn)品既可用于被動(dòng)安全應(yīng)用,也可用于主動(dòng)安全應(yīng)用。過去15年里,ADI以DSP和數(shù)據(jù)轉(zhuǎn)換器在汽車?yán)走_(dá)供應(yīng)鏈中占有一席之地,最近還提供24 GHz和77 GHz/79 GHz雷達(dá)芯片組。
ADI自動(dòng)交通和安全副總裁Chris Jacobs表示:“高級(jí)駕駛員輔助系統(tǒng)已面市,自動(dòng)駕駛即將到來,而道路安全至關(guān)重要。所以,我和工程師致力于使用先進(jìn)的功能和技術(shù)來實(shí)現(xiàn)更高的性能和自主性,從而挽救生命。據(jù)我們估計(jì),基于我們產(chǎn)品的汽車傳感器每天可以挽救8條生命。”
為了保護(hù)駕駛員、乘客和行人,硬件和軟件都需要大量創(chuàng)新。必須開發(fā)一種更高效且優(yōu)化的雷達(dá)技術(shù),提供與航空航天和防務(wù)行業(yè)系統(tǒng)相同的高性能、功能和可靠性,并轉(zhuǎn)化為適合私家汽車市場(chǎng)的尺寸和成本。
ADI自動(dòng)交通和汽車安全事業(yè)部技術(shù)總監(jiān)Mike Keaveney說道:“雖然25萬美元的高分辨率成像雷達(dá)系統(tǒng)成本對(duì)于價(jià)值數(shù)百萬美元的軍用坦克總價(jià)來說不算什么,但與均價(jià)3萬美元的家用汽車相比便貴的離譜了。我們正在探索如何進(jìn)行定制,微型化、加固,降低成本、尺寸、重量和電源需求,以便能夠用于每輛汽車。”
雷達(dá)的挑戰(zhàn)
轉(zhuǎn)讓和采用軍事和航空航天的高成本、高性能雷達(dá)技術(shù),并將其安裝在汽車上,在技術(shù)、美學(xué)和經(jīng)濟(jì)方面都面臨重大挑戰(zhàn)。關(guān)鍵的挑戰(zhàn)不僅在于減少尺寸、重量和功率(SWaP),還要在降低成本的同時(shí)提高性能。雷達(dá)不僅必須能夠進(jìn)行物體檢測(cè),還必須能夠進(jìn)行物體分類。這就要求雷達(dá)圖像的分辨率比目前先進(jìn)系統(tǒng)的分辨率更高。
這些都是ADI致力于實(shí)現(xiàn)的目標(biāo),以推進(jìn)技術(shù)發(fā)展,確保安全,并將經(jīng)濟(jì)高效的汽車?yán)走_(dá)帶給消費(fèi)者。
性能
● 在不增加尺寸、成本和功耗預(yù)算的情況下,將角度分辨率提高到高度自動(dòng)駕駛所需的水平。
● 增加低反射率目標(biāo)發(fā)出的反射點(diǎn)數(shù)量。
● 大幅減少檢測(cè)延遲,特別是對(duì)于橫向移動(dòng)的物體,這可縮短響應(yīng)時(shí)間,并允許車輛在緊急情況下采取規(guī)避行動(dòng)。
SWaP
● 優(yōu)化外形尺寸(大小、重量和功率),同時(shí)保持高性能。
● 在不影響車輛工業(yè)設(shè)計(jì)的前提下,保持系統(tǒng)的美觀。
成本/經(jīng)濟(jì)學(xué)
● 以大眾市場(chǎng)汽車成本約束可接受的價(jià)格和外形尺寸實(shí)現(xiàn)高分辨率雷達(dá)。
● 將成本控制在購(gòu)車者的價(jià)格敏感范圍內(nèi),因?yàn)樗麄儾攀菫檫@一切買單的人。
法規(guī)
● 還必須繼續(xù)遵守政府規(guī)定的高級(jí)駕駛員輔助系統(tǒng)(ADAS)安全特性(如2022年美國(guó)自動(dòng)緊急制動(dòng)指令)。雷達(dá)將不再是一個(gè)選項(xiàng),而是標(biāo)準(zhǔn)。因此,關(guān)鍵是要不斷地將系統(tǒng)成本降低到一個(gè)消費(fèi)者和OEM都可以接受的價(jià)格點(diǎn),同時(shí)仍然保持這些具有挑戰(zhàn)性的ADAS應(yīng)用所需的性能。
如今的汽車?yán)走_(dá)裝置比手機(jī)還小,能探測(cè)您前方、后方或側(cè)方的盲點(diǎn)位置是否存在大型障礙。但這還不夠。
成像雷達(dá)
成像雷達(dá)的概念和實(shí)現(xiàn)更高水平的角度分辨率是一項(xiàng)理想功能,對(duì)于自動(dòng)駕駛出租車來說尤其如此。高分辨率不僅支持物體檢測(cè)(前面有東西),還支持物體分類(前面有自行車、汽車、人或小孩)。
為實(shí)現(xiàn)更高的分辨率,成像雷達(dá)利用高帶寬信號(hào)處理、數(shù)字波束合成和相控陣技術(shù)。所有這些都依賴于大量的硬件和處理能力,其中天線尺寸隨著所需的角度分辨率而縮放,通道計(jì)數(shù)增加以使用通道覆蓋所需的天線區(qū)域。“只是投入更多昂貴的硬件來解決這一問題,是將更高分辨率作為解決方案的一種‘暴力’方式,”Chris Jacobs表示。
如今,ADI正與領(lǐng)先的OEM和一級(jí)供應(yīng)商緊密合作,開發(fā)新的突破性方法,來改進(jìn)雷達(dá)并應(yīng)對(duì)其現(xiàn)代挑戰(zhàn)。如今的汽車采用的雷達(dá)分辨率都不高,只能看到一團(tuán)東西。它可以檢測(cè)到汽車周圍存在物體,可能是摩托車,可能是人或大型卡車,但無法確認(rèn)該物體是什么。在硬件檢測(cè)技術(shù)和軟件算法進(jìn)步的推動(dòng)下,雷達(dá)的分辨率提高,能夠分辨檢測(cè)物體的屬性,這讓我們距離安全的全自動(dòng)駕駛汽車又更近了一步。
分辨率問題和關(guān)于物體區(qū)分的挑戰(zhàn)
現(xiàn)有的常規(guī)汽車?yán)走_(dá)在大視場(chǎng)范圍內(nèi)提供大約10°到20°的水平角度分辨率。
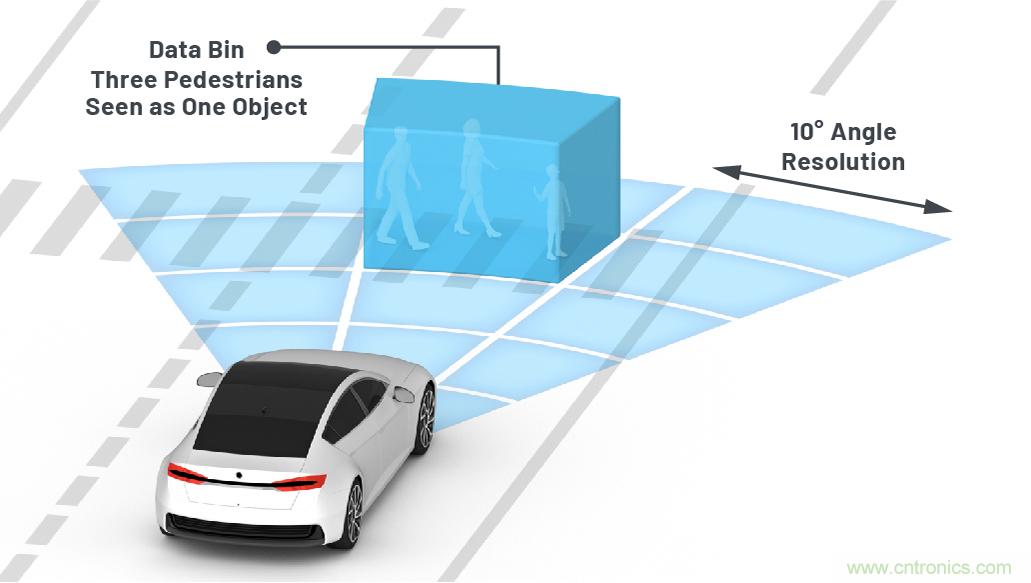
圖1.低分辨率雷達(dá)和隱藏物體?,F(xiàn)有的非成像雷達(dá)的角度分辨率一般在10°到20°,它會(huì)將3名行人看作一個(gè)物體。
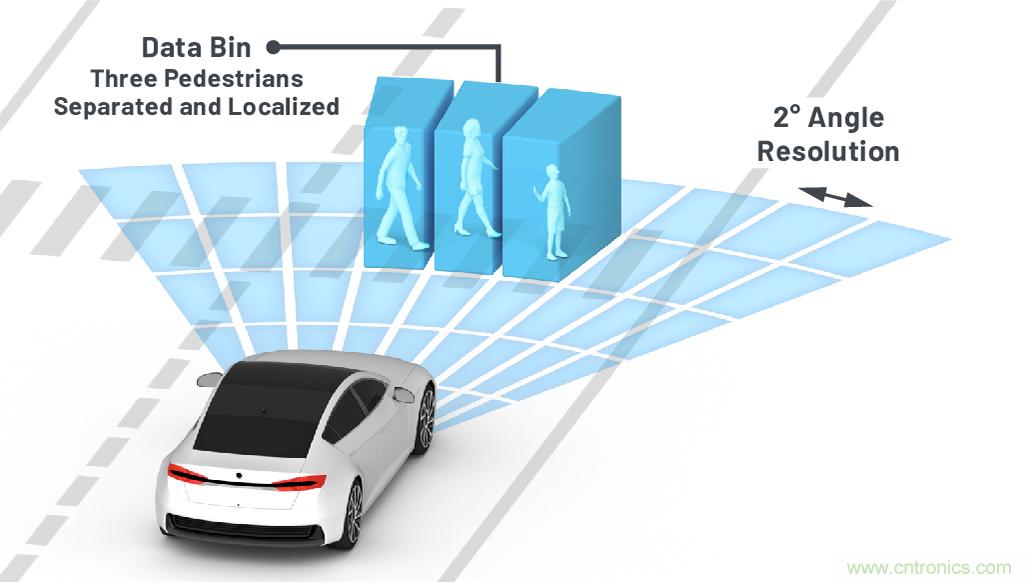
圖2.高分辨率成像雷達(dá)可以顯示隱藏物體。
成像雷達(dá)的角度分辨率為1°至2°,是非成像雷達(dá)分辨率的10倍。數(shù)據(jù)箱收集1°到2°分辨率的信息,幫助區(qū)分和確定3名行人的位置。
數(shù)據(jù)處理
您為更高分辨率所花費(fèi)的成本將給您帶來更多數(shù)據(jù),隨著分辨率增加,數(shù)據(jù)量也相應(yīng)增加,這就需要更多的計(jì)算能力。這就是為什么高效處理所有數(shù)據(jù)的先進(jìn)模式對(duì)于管理大量數(shù)據(jù)和低功耗至關(guān)重要。高效的中央處理或者邊緣處理,將是未來雷達(dá)的基礎(chǔ)。
下一步:協(xié)同雷達(dá)與通信需求
Mike Keaveney說道:“利用現(xiàn)有車載雷達(dá)傳感器硬件的協(xié)同雷達(dá)是未來汽車領(lǐng)域的發(fā)展方向。協(xié)同雷達(dá)就是相干性和識(shí)別協(xié)同創(chuàng)建高分辨率相干圖像的事物需求,在本例中是指檢測(cè)雷達(dá)。一旦實(shí)現(xiàn)了協(xié)同雷達(dá)的經(jīng)濟(jì)性,就能夠享受諸多優(yōu)勢(shì)。”
協(xié)同雷達(dá)可提供成像雷達(dá)性能,而不會(huì)顯著增加車內(nèi)個(gè)別現(xiàn)有雷達(dá)系統(tǒng)的大小。這是因?yàn)橛行Э讖浆F(xiàn)在由兩個(gè)(或多個(gè))具有重疊視場(chǎng)的分布式雷達(dá)傳感器之間的距離設(shè)定,而不是由任何一個(gè)傳感器的物理尺寸預(yù)先確定。
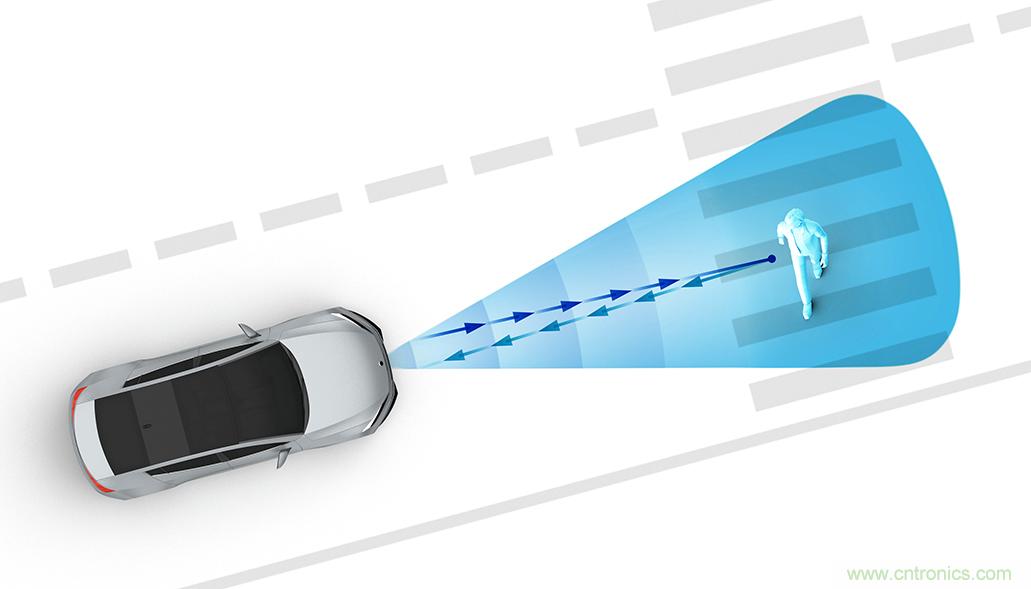
圖3.初級(jí)雷達(dá)的窄孔徑。
初級(jí)雷達(dá)現(xiàn)在常用于汽車。
來自每個(gè)發(fā)射源的雷達(dá)信號(hào)反射到一個(gè)物體上,然后傳回到原點(diǎn)??讖?,或者說初級(jí)雷達(dá)的性能,是以英寸為單位的雷達(dá)發(fā)射器本身的寬度。
協(xié)同雷達(dá)/SuperRADAR較大的孔徑
SuperRADAR是ADI通過多個(gè)具有重疊視場(chǎng)的雷達(dá)波束實(shí)現(xiàn)相干性算法的方法。
基于SuperRADAR的協(xié)同雷達(dá)使用低速鏈路在雷達(dá)源之間進(jìn)行粗略定時(shí)。每個(gè)傳感器向中央處理器發(fā)送數(shù)據(jù),或者可能從一個(gè)雷達(dá)向另一個(gè)雷達(dá)發(fā)送數(shù)據(jù),并在邊緣傳感器上進(jìn)行處理,后面這種方法更經(jīng)濟(jì)。
Chris Jacobs表示:“傳統(tǒng)協(xié)同雷達(dá)系統(tǒng)不容易實(shí)現(xiàn),因?yàn)樾枰诶走_(dá)之間運(yùn)行高頻鏈路。實(shí)現(xiàn)這種相干性的硬件開銷和成本非常高。”
對(duì)于汽車?yán)走_(dá)來說,提高協(xié)同雷達(dá)的性價(jià)比非常有必要。Jacobs說:“向汽車添加硬件的傳統(tǒng)方法并非解決方案,我們必須換個(gè)思路來看問題。我們可以通過智能方式,用算法將這些技術(shù)結(jié)合起來,使用系統(tǒng)中的相同硬件提高組合系統(tǒng)性能。ADI的SuperRADAR方法允許雷達(dá)系統(tǒng)產(chǎn)生多個(gè)非相干圖像的相干疊加。”
協(xié)同雷達(dá)
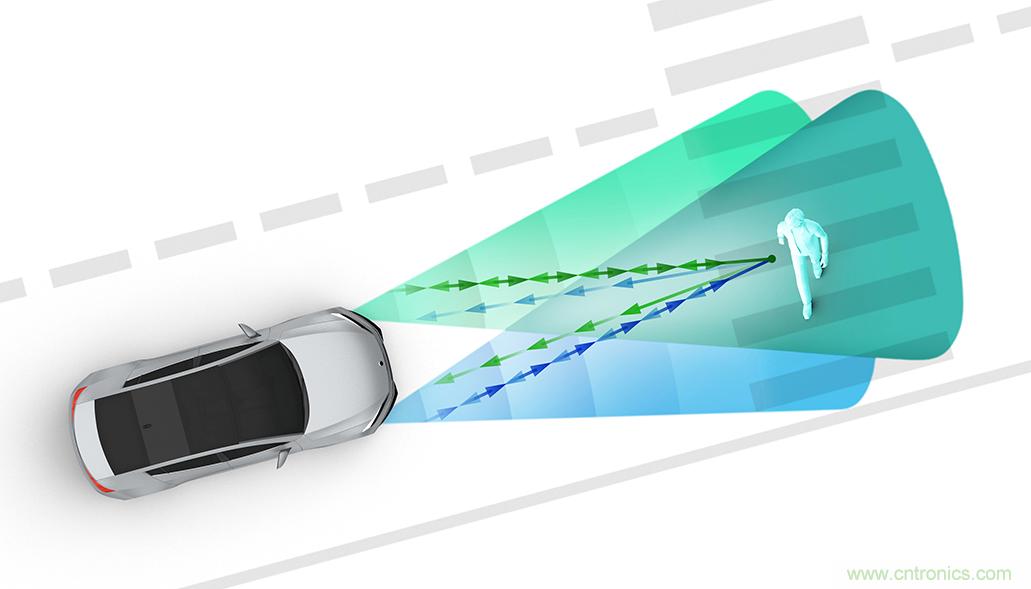
圖4.協(xié)同雷達(dá)較大的孔徑。
協(xié)同雷達(dá)的工作原理是什么?來自每個(gè)源的信號(hào)反射到一個(gè)物體上,被兩個(gè)雷達(dá)接收器捕獲。因此,同一目標(biāo)有2個(gè)外觀(或兩個(gè)不同的視圖),并且目標(biāo)上的時(shí)間為2倍,而初級(jí)雷達(dá)只有一個(gè)外觀,時(shí)間也只有1倍。此外,由于兩個(gè)雷達(dá)協(xié)同工作,雷達(dá)孔徑(與性能成正比)是汽車前部的尺寸,兩個(gè)角雷達(dá)之間的距離(大約4英尺),與初級(jí)雷達(dá)的英寸完全不同。
這種方法允許實(shí)現(xiàn)經(jīng)濟(jì)高效的傳感器設(shè)計(jì),可將傳感器放在車輛周圍的多個(gè)點(diǎn)上,支持出色的物體檢測(cè)和分類。
SuperRADAR的優(yōu)勢(shì):1 + 1 > 2
SuperRADAR不僅降低尺寸、重量和功耗,還為系統(tǒng)帶來更多功能,從而提高分辨率,同時(shí)顯著減少硬件,在更合理的成本范圍內(nèi)提高應(yīng)用性能。
更多反射點(diǎn):目標(biāo)上的時(shí)間為2倍
SuperRADAR可使用同樣多的硬件提供兩倍性能。或者,使用一半的雷達(dá)通道來保持相同的性能。Chris Jacobs說:“借助SuperRADAR,我們得到的分辨率是單個(gè)雷達(dá)的兩倍??赡軙?huì)需要額外的處理能力,但是汽車級(jí)DSP/MCU的路線圖足以滿足這些處理需求。”
SuperRADAR實(shí)際上就是雷達(dá)融合。我們將融合兩個(gè)獨(dú)立的雷達(dá)視圖,因此得到的分辨率比單獨(dú)完成的更好。Jacobs表示:“融合將成為未來實(shí)施ADAS的標(biāo)準(zhǔn)方式。”
降低延遲:快速計(jì)算橫向速度可挽救生命
車輛成像系統(tǒng)的一個(gè)重點(diǎn)是能夠快速計(jì)算橫向速度,即物體正交(以直角)移動(dòng)到車輛行駛方向的速度。但是,要實(shí)現(xiàn)足夠低的誤報(bào)率,即使是主要基于攝像頭的出色機(jī)器學(xué)習(xí)算法仍然需要大約300 ms來進(jìn)行橫向移動(dòng)檢測(cè)。對(duì)于在以每小時(shí)60英里速度行駛的車輛前方行走的行人來說,毫秒之差就關(guān)系到人員受傷的輕重程度,因此響應(yīng)時(shí)間至關(guān)重要。
300 ms延遲是由系統(tǒng)從10個(gè)連續(xù)視頻幀執(zhí)行增量矢量計(jì)算所需的時(shí)間造成的,10個(gè)是以可接受的低誤報(bào)率進(jìn)行可靠檢測(cè)所需的數(shù)目。但是,由于SuperRADAR的寬有效孔徑,以及它將來自兩個(gè)或多個(gè)傳感器的圖像連貫組合的方式,它能夠在一個(gè)30 ms的測(cè)量周期內(nèi)精確地計(jì)算出速度的切向分量和徑向分量(這種延遲比目前一流的系統(tǒng)快10倍)。這種低延遲的檢測(cè)比F1賽車手的反應(yīng)時(shí)間100 ms要少,遠(yuǎn)遠(yuǎn)少于一般駕駛員的反應(yīng)時(shí)間!
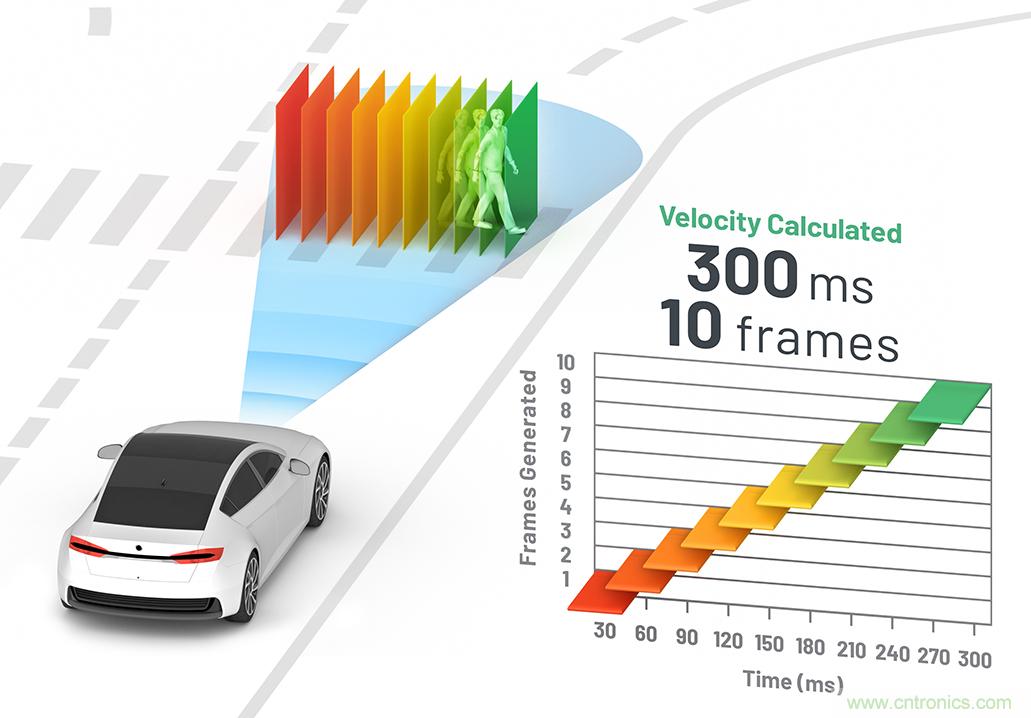
圖5.今天的圖像系統(tǒng)有300 ms的延遲和10幀圖像用于檢測(cè)正交運(yùn)動(dòng)。
使用當(dāng)今常見的成像雷達(dá)技術(shù),如果有人過馬路,就需要多個(gè)攝像頭圖像來顯示正在移動(dòng)的物體。每個(gè)攝像頭圖像需要30 ms。10個(gè)圖像需要300 ms。在這段時(shí)間內(nèi),汽車移動(dòng)幾英尺。
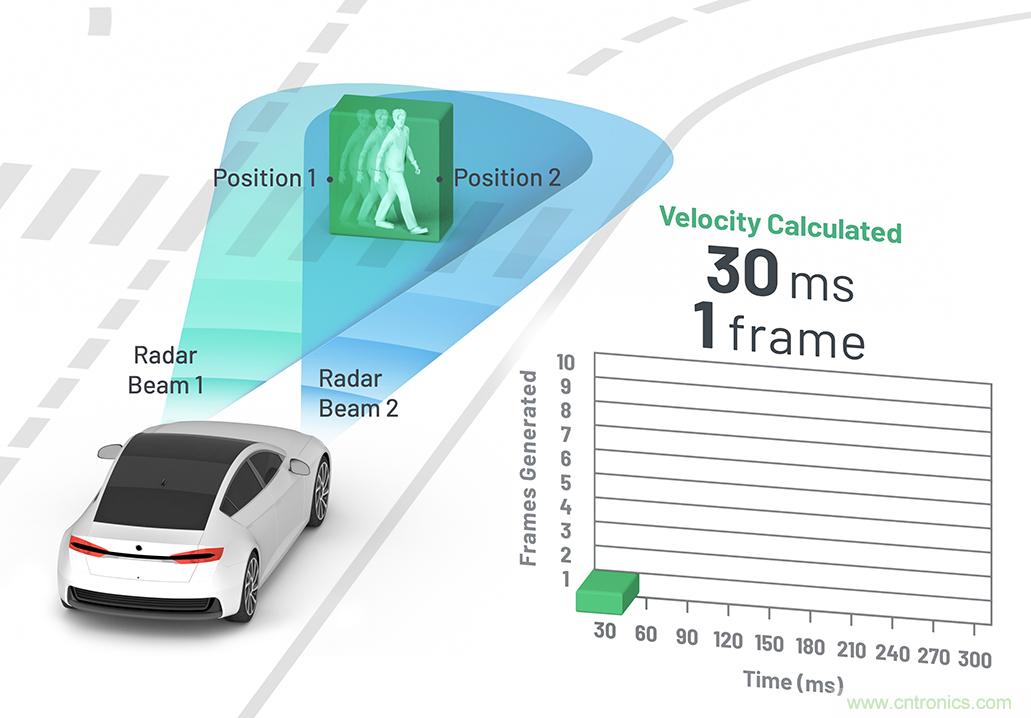
圖6.SuperRADAR系統(tǒng)有30 ms的幀延遲來檢測(cè)正交運(yùn)動(dòng)。
兩個(gè)雷達(dá)協(xié)同工作,可以進(jìn)行三角測(cè)量,從而捕捉運(yùn)動(dòng)中的物體,因?yàn)閮蓚€(gè)雷達(dá)源都是偏置的。只需要先用雷達(dá)波束1從位置1映射這個(gè)人,然后在30 ms后用雷達(dá)波束2從位置2映射。這就讓汽車知道人的移動(dòng)方向。
SuperRADAR只需使用傳統(tǒng)成像雷達(dá)十分之一的時(shí)間即可識(shí)別穿越道路的移動(dòng)物體。
SuperRADAR的經(jīng)濟(jì)性
SuperRADAR概念不僅是降低整體系統(tǒng)成本的有效方法,而且能夠滿足性能需求,為最終應(yīng)用帶來更大的價(jià)值。
Chris Jacobs表示,“我們要的是成像雷達(dá)的性能,現(xiàn)在只能在昂貴的自動(dòng)駕駛出租車應(yīng)用中找到,還要去除所有昂貴的硬件,把價(jià)格降到個(gè)人車主能夠承受的水平。這正是SuperRADAR發(fā)揮作用的地方,用最少的硬件占用空間和硬件上面運(yùn)行的軟件,產(chǎn)生兩倍的性能。”
汽車的未來
在我們展望汽車領(lǐng)域的未來時(shí),我們發(fā)現(xiàn)可能需要從根本上重新構(gòu)建現(xiàn)有系統(tǒng)?,F(xiàn)有的汽車平臺(tái)與未來的汽車平臺(tái)極為不同。
憑借在垂直領(lǐng)域的豐富經(jīng)驗(yàn)和專業(yè)知識(shí),ADI具備獨(dú)特的優(yōu)勢(shì),能夠通過硬件和軟件產(chǎn)品的組合來優(yōu)化未來汽車的雷達(dá)處理需求,為最終應(yīng)用帶來更多價(jià)值。這種算法直接解決了汽車制造商目前和未來面臨的總擁有成本(TOCO)挑戰(zhàn)。
SuperRADAR潛力十足,而目前還處于初步探索階段。這項(xiàng)技術(shù)不僅是一種推動(dòng)ADAS的更高性能、更經(jīng)濟(jì)高效的解決方案,而且最終會(huì)挽救生命。
作者簡(jiǎn)介
Chris Jacobs于1995年加入ADI公司。在任職期間,Chris在消費(fèi)電子、通信、工業(yè)和汽車部門擔(dān)任過多個(gè)設(shè)計(jì)工程、設(shè)計(jì)管理和業(yè)務(wù)領(lǐng)導(dǎo)職務(wù)。他目前是ADI公司自動(dòng)交通和汽車安全事業(yè)部副總裁。Chris擁有克拉克森大學(xué)計(jì)算機(jī)工程學(xué)士學(xué)位、東北大學(xué)電氣工程碩士學(xué)位和波士頓大學(xué)工商管理碩士學(xué)位。聯(lián)系方式:chris.jacobs@analog.com。
推薦閱讀:




