

【導(dǎo)讀】顧名思義,鎖相環(huán)(PLL)使用鑒相器比較反饋信號與參考信號,將兩個信號的相位鎖定在一起。雖然這種特性有許多用武之地,但是PLL如今最常用于頻率合成,通常充當(dāng)上變頻器/下變頻器中的本振(LO),或者充當(dāng)高速模數(shù)轉(zhuǎn)換器(ADC)或數(shù)模轉(zhuǎn)換器(DAC)的時鐘。
顧名思義,鎖相環(huán)(PLL)使用鑒相器比較反饋信號與參考信號,將兩個信號的相位鎖定在一起。雖然這種特性有許多用武之地,但是PLL如今最常用于頻率合成,通常充當(dāng)上變頻器/下變頻器中的本振(LO),或者充當(dāng)高速模數(shù)轉(zhuǎn)換器(ADC)或數(shù)模轉(zhuǎn)換器(DAC)的時鐘。
直到最近,我們很少注意這些電路中的相位行為。但隨著對效率、帶寬和性能的需求日益增長,RF工程師必須推出新技術(shù)來提高頻譜和功率效率。信號相位的重復(fù)性、可預(yù)測性和可調(diào)性在現(xiàn)代通信和儀器儀表應(yīng)用中均起到日益重要的作用。
一切都是相對的
關(guān)于相位測量,如果不是相對于另一個信號或相對于原始相位則毫無意義。例如,使用矢量網(wǎng)絡(luò)分析儀(VNA)對放大器之類的兩端口網(wǎng)絡(luò)進(jìn)行相位測量,就是相對于輸入相位ANG(S21)測量輸出相位的。單輸入相位指相對于入射相位ANG(S11)的反射相位。在PLL合成器上,相位測量指的是相對于輸入?yún)⒖枷辔坏臏y量或信號間的相位測量。任何相位測量的理想狀態(tài)就是測得與原始相位相比的精確期望值,但是非線性、非理想性、溫差和電路板跡線以及其他制造差異都會使得相位在信號生成中更容易發(fā)生改變。對于本文而言,“同相”是指幅度和時序特性相同的信號;確定性相位是指信號之間的相移是已知和可預(yù)測的。
示波器測量相位
為了比較兩個不同頻率的相位,可以使用高速示波器比較輸出相位與參考相位,這是一種相對直觀的方法。為了直觀可見,輸入相位和輸出相位通常必須是彼此的整數(shù)倍。這在許多時鐘 電路中相對比較常見。對于整數(shù)N分頻PLL,輸入頻率(REFIN)和輸出頻率(RFOUT)之間的關(guān)系通常是確定和可重復(fù)的。只需將示波器探頭放在REFIN和RFOUT上,但注意僅捕獲確定已建立相位時的信號。像RTO1044這樣的高級示波器,只有在滿足某些條件時才允許事件觸發(fā)激活:比如將特定的數(shù)字模式寫入PLL器件以及已知信號的上升沿出現(xiàn)時。鑒于數(shù)字模式的寫入與最終信號穩(wěn)定之間可能會有一些延遲,因此在這兩個事件之間插入一些延遲至關(guān)重要,這種特定型號的儀器就可以實現(xiàn)這一功能。
圖1的測量是為了確認(rèn)ADF4356 PLL相對于已知參考信號(在這種情況下,另一個ADF4356設(shè)定相同的輸出頻率)的相位延遲在上電時是否恒定和可重復(fù)。為了正確設(shè)置儀器,將兩個低速探頭連接到ADF4356 SPI接口的CLK線路和DATA線路。若要將數(shù)字模式寫入特定頻率,則必須等待1秒鐘,儀器才能捕獲顯示兩個PLL輸出的時域圖。
與控制!")
圖1. 整數(shù)N分頻設(shè)置
對于此測量,兩個ADF4356 PLL鎖定在4GHz的VCO頻率并在8MHz至500MHz的范圍內(nèi)分頻,其中一個PLL使用軟件掉電功能反復(fù)開啟和關(guān)閉。示波器采用無限持續(xù)模式進(jìn)行119次采集,兩個PLL之間的相位差恒定且可重復(fù)。為了確保相位差可重復(fù),需遵循許多注意事項。相比較而言,低的R分頻值比高的R分頻值帶來的不確定性較少,而且將來自VCO輸出的分頻反饋饋送到N計數(shù)器輸入至關(guān)重要。鑒于ADF4356 PLL和VCO包含1024個不同的VCO頻段,務(wù)必使用手動校準(zhǔn)覆蓋程序來消除此不確定性。
相位再同步定義
相位再同步是指小數(shù)N分頻PLL在每個給定頻率下返回相同相移的能力。也就是說,相位為P1的頻率A在改為頻率B后,當(dāng)頻率重新設(shè)定為回到F1時,觀察到仍具有相同的原始相位P1。該定義忽略了由VCO漂移、漏電流、溫度變化等因素引起的變化。
再同步將復(fù)位脈沖發(fā)送到小數(shù)N分頻∑-?調(diào)制器,從而使其處于已知的可重復(fù)狀態(tài)。在完成VCO頻段選擇和環(huán)路濾波器建立時間等頻率建立機(jī)制之后,需要施加此復(fù)位脈沖。其值由寄存器12中的超時計數(shù)器控制。新近的PLL能夠調(diào)整此復(fù)位脈沖的時序,實現(xiàn)了一定程度的輸出信號可調(diào)性。此外,它還能以360°/225步進(jìn)改變時序,比大多數(shù)儀器更輕松地完成測量。
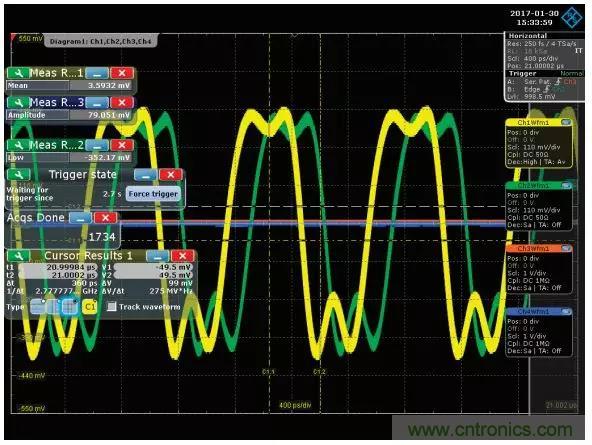
圖2. 進(jìn)行小數(shù)N分頻再同步,頻率范圍4694 MHz至4002.5 MHz
對于本實驗,兩個ADF4356 VCO的頻率均設(shè)定為4002.5 MHz且采用8分頻。第二個PLL的VCO頻率設(shè)定為4694MHz,然后設(shè)定為回到4002.5 MHz。通過使用示波器檢查PLL行為可以看出,在1700次頻率變化后,PLL每次都穩(wěn)定在同一相位。
為了表征不同的相移特性,相位字設(shè)定為4194304/225(相當(dāng)于90°)。設(shè)定90°、180°、270°和0°的相應(yīng)類似值,再次查看示波圖(圖3)。
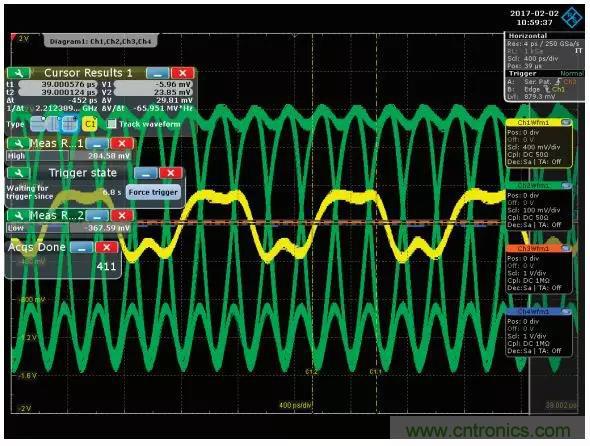
圖3. 具有可變相移的相位再同步
相對于通道1上的原始信號,觀察到四個間隔相等的信號,從而確認(rèn)了具有可編程偏移的相位再同步的準(zhǔn)確性。
該功能非常有用,意味著可以為每個用戶頻率創(chuàng)建相位值查找表,在每次使用時記錄相位值。在需要組合四個同相LO頻率的應(yīng)用中,相位再同步和偏移功能用于調(diào)整輸出相位,從而共同 提供低6dB的相位噪聲。如果用作可調(diào)LO(可能在信號分析儀的第一級上),再同步和相移功能允許用戶在上電時執(zhí)行一次性校準(zhǔn)以確定每個LO的精確相位值。在用作LO時,可以根據(jù)需要按照每個LO設(shè)定相位值,從而無需在每個頻率下執(zhí)行校準(zhǔn)。
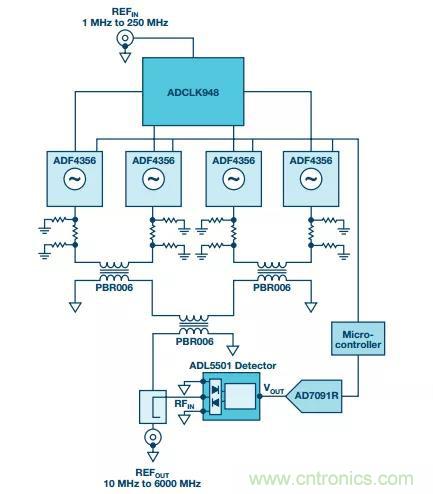
圖4. 需要精確控制PLL輸出相位的相位關(guān)鍵型應(yīng)用
對于像網(wǎng)絡(luò)分析儀這樣的相位關(guān)鍵型應(yīng)用,該電路可以在上電時測量每個頻率下的相位值,然后根據(jù)需要設(shè)定,因為LO會作用于整個目標(biāo)范圍。
測量相位、矢量信號和網(wǎng)絡(luò)分析儀
矢量信號和網(wǎng)絡(luò)分析儀也可用于表征相位行為,盡管其僅限用于比較器件的相位與其初始值??梢詫SWP等高級分析儀置于FM解調(diào)模式并選擇相位輸出。
這對于評估ADF4356 PLL上的相位再同步功能非常有用。下面的跡線(圖5)表示ADF4356相位在5025MHz的輸出頻率下變化了180°。

圖5. 180°相移時的FSUP FM解調(diào)器輸出
相位調(diào)整
相位調(diào)整功能可避免∑-?調(diào)制器復(fù)位,只需為現(xiàn)有相位添加一個0°至360°之間的相位字即可。在不希望相位復(fù)位的應(yīng)用中,這一操作非常有用。它可以用于動態(tài)調(diào)整相位字以補(bǔ)償由于溫 度等影響而產(chǎn)生的相位差。
相位調(diào)整在R0每次更新(采用寄存器3的編程值)時為現(xiàn)有信號添加相位。它不包含相位再同步等復(fù)位脈沖。以下來自FSWP的測量結(jié)果表示的是原始信號增加90°(圖6)和270°(圖7)的情況。在這兩種情況下,ADF4356的輸出頻率在相位更改之前都設(shè)置為5025 MHz。
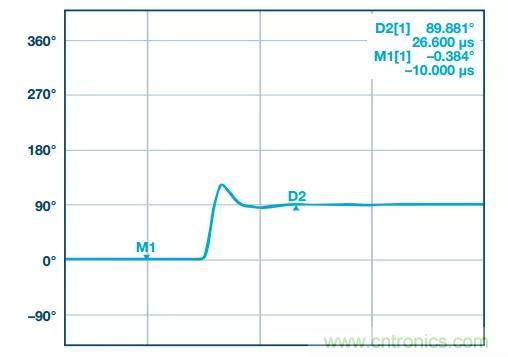
圖6. 90°變化
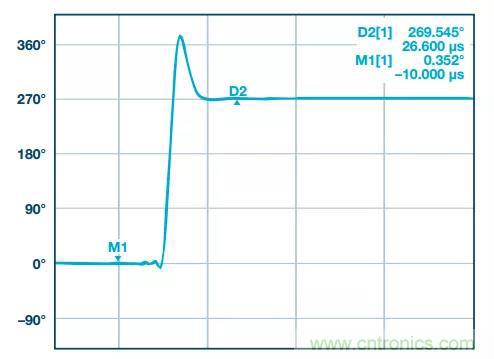
圖7. 270°變化
整個溫度范圍內(nèi)的行為
電感器的物理參數(shù)隨溫度而變化,其電特性也一樣,表現(xiàn)為相位變化。為了減少這種相位變化,用戶可以設(shè)定所需的相移以保持相同的相位。輸出頻率設(shè)定為4GHz的兩個ADF4356 PLL,以相同相位放置在同一爐室中,密切跟蹤彼此的相位(圖2),從而證明用戶可以根據(jù)溫度調(diào)整相位。
與控制!")
圖8. ADF4356在整個溫度范圍內(nèi)的相位漂移,測量時的VCO頻率為4GHz。
5G
波束成形是實現(xiàn)5G網(wǎng)絡(luò)架構(gòu)的一種關(guān)鍵技術(shù)。這些網(wǎng)絡(luò)中使用多個天線陣列元件,每個元件具有不同的相位和幅度,將天線能量直接傳導(dǎo)到最終用戶。對于該應(yīng)用,相位重復(fù)性是關(guān)鍵。波束成形需要LO相位具有可重復(fù)性,并且如果該相位具有不確定性,則需要波束成形電路進(jìn)行額外校準(zhǔn)。
圖9所示為相隔四分之一波長并由同相驅(qū)動的兩個半波單元的方向圖。天線輻射圖幾乎是全向的,觀察不到波束成形。圖10顯示了由90°異相信號驅(qū)動的兩個元件,得到的輻射圖顯示輻 射圖更加集中。隨著元件陣列數(shù)量的增加,朝向最終用戶的輻射圖的準(zhǔn)確度也有所提升,進(jìn)一步提高了光譜效率。
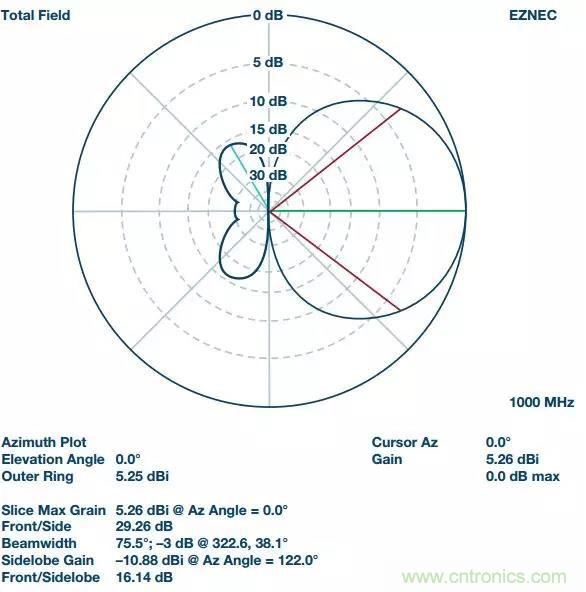
圖9. 無波束成形
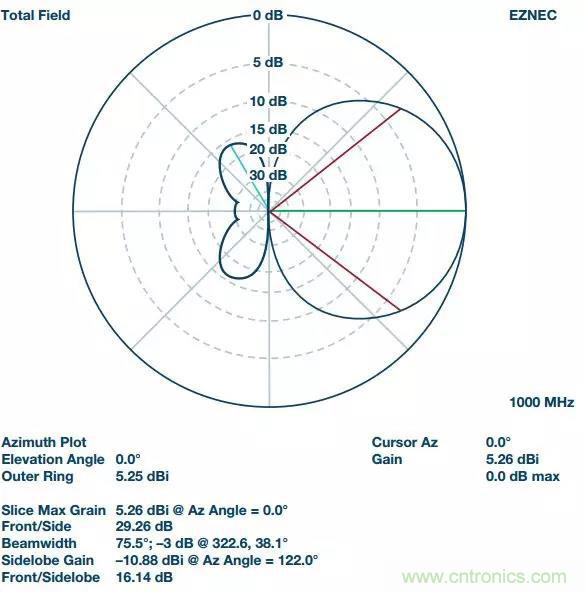
圖10. 波束成形
相位再同步功能確保消除了LO相位特性的不確定性。此外,還能夠調(diào)整此相位,為用戶提供了另一種方法來克服存在于電路中而波束成形器或基帶電路難以調(diào)整的任何其他相位延遲。
結(jié)論
相位再同步將ADF4356以及類似的PLL器件置于已知相位,這樣可以實現(xiàn)許多應(yīng)用并大大簡化校準(zhǔn)程序。


