
【導(dǎo)讀】現(xiàn)在有車(chē)一族是越來(lái)越多,對(duì)于很多新手來(lái)說(shuō)倒車(chē)?yán)走_(dá)可謂是車(chē)輛必須有的設(shè)備,然而雖然有倒車(chē)?yán)走_(dá)的幫助有關(guān)倒車(chē)發(fā)生的剮蹭事故還是經(jīng)常發(fā)生。為解決超聲倒車(chē)?yán)走_(dá)指向性不足和存在探測(cè)盲區(qū)的缺點(diǎn),針對(duì)倒車(chē)?yán)走_(dá)有盲區(qū)?如何避免視野盲區(qū)?等問(wèn)題咨詢了相關(guān)的技術(shù)人員,他們給出了如下解決方案!

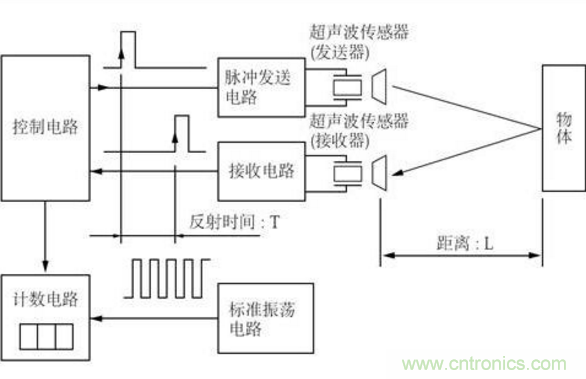
倒車(chē)?yán)走_(dá),即“倒車(chē)防撞雷達(dá)”,也叫“泊車(chē)輔助裝置”,主要由超聲波傳感器(俗稱探頭)、控制器和顯示器(或蜂鳴器)等部分組成。系統(tǒng)采用超聲波測(cè)距原理,由裝置在車(chē)尾保險(xiǎn)杠上的探頭發(fā)送超聲波撞擊障礙物后反射此聲波,當(dāng)遇到障礙物時(shí),產(chǎn)生回波信號(hào),傳感器接收到回波信號(hào)后經(jīng)控制器進(jìn)行數(shù)據(jù)處理、判斷出障礙物的位置,由顯示器顯示距離并發(fā)出其它警示信號(hào),得到及時(shí)警示,從而使駕駛者停車(chē)、倒車(chē)時(shí)做到心中有“數(shù)”,使倒車(chē)變得更安全、更輕松。
汽車(chē)的倒車(chē)?yán)走_(dá)應(yīng)用了超聲波測(cè)距系統(tǒng),目前有兩種常用的超聲波測(cè)距方案。一種是基于單片機(jī)或者嵌入式設(shè)備的超聲波測(cè)距系統(tǒng),一種是基于CPLD(Complex Programmable Logic Device)的超聲波測(cè)距系統(tǒng)。
倒車(chē)?yán)走_(dá)中的超聲波傳感器工作原理
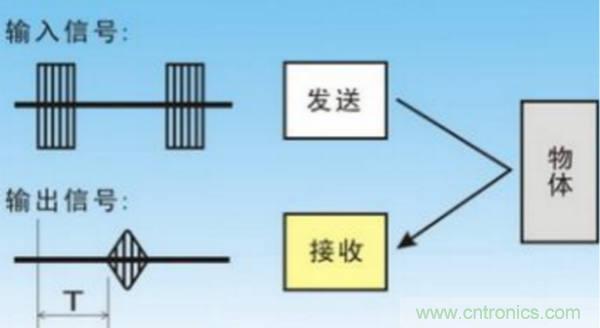
超聲波(指頻率20kHz以上機(jī)械波)是一種特殊的聲波,具有聲波折射、反射、干涉等基本物理特性。超聲波測(cè)距傳感器通過(guò)超聲波發(fā)射裝置向外發(fā)出超聲波,到通過(guò)接收器接收到發(fā)送過(guò)來(lái)超聲波時(shí)的時(shí)間差來(lái)測(cè)算出距離長(zhǎng)度。超聲波發(fā)射器向外面某一個(gè)方向發(fā)射出超聲波信號(hào),在發(fā)射超聲波時(shí)刻的同時(shí)開(kāi)始進(jìn)行計(jì)時(shí),超聲波通過(guò)空氣進(jìn)行傳播,傳播途中遇到障礙物就會(huì)立即返射傳播回來(lái),超聲波接收器在收到反射波的時(shí)刻就立即停止計(jì)時(shí)。在空氣中超聲波的傳播速度是340m/s,計(jì)時(shí)器通過(guò)記錄時(shí)間t,就可以測(cè)算出從發(fā)射點(diǎn)到障礙物之間的距離長(zhǎng)度(s),即:s=340t/2。
式中L為測(cè)量的距離長(zhǎng)度;C為超聲波在空氣中的傳播速度;T為測(cè)量距離傳播的時(shí)間差(T為從發(fā)射到接收的時(shí)間)。
倒車(chē)?yán)走_(dá)有盲區(qū)?如何避免視野盲區(qū)?
倒車(chē)?yán)走_(dá)的探測(cè)頭后保險(xiǎn)杠上安裝的超聲波傳感器,位置通常距地面50至60厘米。探頭發(fā)射的超聲波呈喇叭狀向外擴(kuò)散,區(qū)域漸漸變大。這也就意味著,從地面到探頭底部,即探頭正下方的區(qū)域,會(huì)形成三角形的盲區(qū)。從實(shí)踐可以得出結(jié)論,從地面到低于探頭10至15厘米的物體,雷達(dá)難以發(fā)現(xiàn)。所以倒車(chē)?yán)走_(dá)是存在一定的視覺(jué)盲區(qū)的,而且是車(chē)身越高盲區(qū)越大,低于探頭中心10到15厘米以下,障礙物就有可能被探頭所忽視,如果離它越近,掃描的范圍就越小,危險(xiǎn)度越大。
除此之外,每個(gè)探頭發(fā)出的超聲波都有一定的范圍,因此兩個(gè)探頭之間的位置,也會(huì)形成盲區(qū)。
車(chē)輛在倒車(chē)的時(shí)候,由于倒車(chē)?yán)走_(dá)確實(shí)是存在盲區(qū)的,所以咱們?cè)诘管?chē)的時(shí)候盡量不要過(guò)分依賴倒車(chē)?yán)走_(dá),倒車(chē)前,如果不明后方情況的話,建議下車(chē)觀察車(chē)后狀況,小心慢行才是最重要的。減慢車(chē)速:這樣倒車(chē)時(shí)即便是雷達(dá)對(duì)障礙物的探測(cè)不夠敏感,也可在突然報(bào)警時(shí)做出反應(yīng)。
溫馨提示大家,如果倒車(chē)速度太快,倒車(chē)?yán)走_(dá)上的超聲波傳感器探頭也可能反應(yīng)不過(guò)來(lái),建議司機(jī)倒車(chē)車(chē)速要小于每小時(shí)5公里。另外,開(kāi)始倒車(chē)時(shí),應(yīng)通過(guò)反光鏡和后視鏡不斷觀察車(chē)后方情況,余光還要顧及車(chē)前方;遇大型車(chē)更應(yīng)該遠(yuǎn)離2米以上。特別在綠燈時(shí),不要搶先超過(guò)正在轉(zhuǎn)彎的機(jī)動(dòng)車(chē)。更不要在紅燈時(shí),超越斑馬線停留,那樣很容易被轉(zhuǎn)彎車(chē)輛的內(nèi)外輪差卷入車(chē)輪。
推薦閱讀:



