

【導讀】如何選擇符合目標系統規(guī)格以及標準的相應架構、電路和元件呢?這些是由電路滿足在效率、帶寬和精度方面提供系統所需性能,同時又滿足安全隔離要求來決定的。本文探討了系統架構選擇對電源和控制電路設計以及系統性能的影響。
隔離構架
我們關心的問題是您需要根據用戶提供的命令,安全地控制從交流電源到負載的能量流動。此問題在圖 1 所示的高電平電機驅動系統圖中針對以下三個電源域進行了闡述:給定、控制和功率。
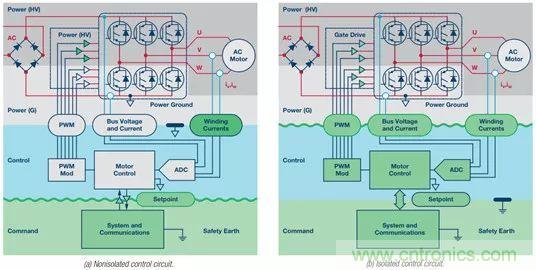
圖1. 電機控制系統中的隔離架構
安全性要求是,用戶給定電路必須與功率電路上的危險電壓進行電位隔離。架構決策取決于隔離柵放置在給定和控制電路之間還是控制和功率電路之間。在電路之間引入隔離柵會影響信號完整性并增加成本。
模擬反饋信號的隔離尤其困難,因為傳統變壓器方法會抑制直流信號分量并引入非線性。低速時的數字信號隔離相當簡單,但在高速或需要低延遲時則非常困難,并且耗電量巨大。帶3相逆變器的系統中的電源隔離尤為困難,因為有多個電源域連接至電源電路。電源電路有四個不同域,這些域需彼此之間需要功能性隔離;所以高端柵極驅動和繞組電流信號需要與控制電路功能性隔離,即使兩者可能與功率地共地。
非隔離式控制架構
非隔離式控制架構在控制和電源電路之間存在共同的接地連接。這樣電機控制 ADC 可獲取電源電路中的所有信號。電機繞組電流流入低側逆變器臂時,ADC 在基于中心的PWM信號的中點處進行采樣。低側 IGBT 柵極的驅動器可以是簡單的非隔離式,但 PWM 信號須經由具有功能性隔離或電平移位轉換實現與三個高側 IGBT 柵極隔離。命令和控制電路之間的隔離造成的復雜性取決于最終應用,但通常涉及使用獨立系統和通信處理器。簡單處理器即可管理前面板接口并在慢速串行接口上發(fā)送速度命令的架構在家用設備或低端工業(yè)應用中可以接受。由于命令接口的高帶寬要求,非隔離式架構在用于機器人和自動化應用的高性能驅動器中較少見。
隔離式控制架構
隔離式控制架構在控制和命令電路之間存在共同的接地連接。這使得控制和命令接口之間可以實現非常緊密的耦合,并且可使用單個處理器。隔離問題轉到電源逆變器信號上來,從而帶來一系列不同挑戰(zhàn)。柵極驅動信號需要相對高速的數字隔離來滿足逆變器的時序要求。由于存在非常高的電壓,磁性或光學耦合的驅動器在隔離要求極高的逆變器應用中表現良好。直流母線電壓隔離電路的要求則適中,這是因為其需要的動態(tài)范圍和帶寬較低。電機電流反饋是高性能驅動器中最大的難題,因為其需要高帶寬和線性隔離。電流互感器(CT)是很好的選擇,因為它們提供的隔離信號能夠輕松測量。CT在低電流時具有非線性,不會傳輸直流電平,但廣泛用于低端逆變器中。CT還用于帶非隔離式控制架構的大功率逆變器,因為這些場合下采用分流電阻采樣會導致損耗太大。開環(huán)和閉環(huán)霍爾效應電流傳感器可測量交流信號,因此更適合高端驅動器,但受失調影響。阻性分流器可提供高帶寬、線性信號,而且偏移低,但需要與高帶寬、低偏移隔離放大器相匹配。通常,電機控制AD C可直接采樣隔離電流信號,但下一節(jié)描述的替代測量架構可將隔離問題轉移到數字域,并且能夠大幅提升性能。
使用隔離式轉換器的逆變器反饋
改善隔離系統線性度的一種常見方法是將ADC移至隔離柵的另一側并隔離數字信號。在許多情況下,這需要將串聯 ADC 與數字信號隔離器結合使用。由于對電機電流反饋存在高頻的特殊要求,以及需要對驅動保護進行快速響應,因此可選擇 Σ-Δ 型 ADC。Σ-Δ 型 ADC 配有一個可將模擬信號轉換為一位碼流的線性調制器,其后配備可將信號重構為高分辨率數字字的數字濾波器。
此方法的好處是可使用兩種不同的數字濾波器:
● 較慢的用于高保真反饋,
● 另一個低保真快速濾波器用于保護逆變器。
在圖 2 中,繞組分流器用于測量電機繞組電流,隔離式 ADC 用于在隔離柵上傳輸 10 MHz 數據流。Sinc 濾波器可將高分辨率電流數據提交給電機控制算法,該算法會計算施加所需逆變器電壓需要的逆變器占空比。另一個低分辨率濾波器可檢測電流過載,并在出現故障時將跳變信號發(fā)送至 PWM 調制器。Sinc 濾波器頻率響應曲線解釋說明了合適的參數選擇如何能夠使濾波器抑制電流采樣中的 PWM開 關紋波。
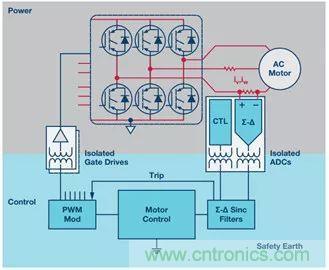
圖2. 隔離式電流反饋
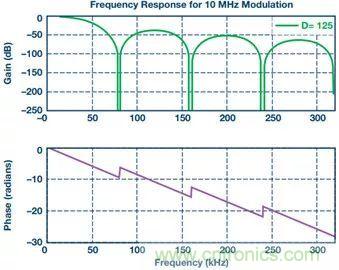
圖3. Sinc 濾波器頻率響應
電源輸出隔離
兩種控制架構的共同問題是需要支持多個隔離電源域。如果每個域需要多個偏置軌,就更加難以實現。圖 4 的電路可產生 +15 V 和 –7.5 V 電壓用于柵極驅動,+5 V 電壓用于為 ADC 供電,均在一個域中,同時每個域僅使用一個變壓器繞組和兩個引腳。使用一個變壓器磁芯和骨架為四個不同電源域創(chuàng)造雙電源或三電源。
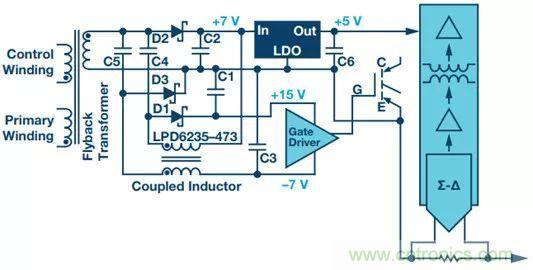
圖4. 柵極驅動和電流反饋轉換器的隔離電源電路
推薦閱讀:



