
【導(dǎo)讀】隔離用戶及敏感電子部件是電機(jī)控制系統(tǒng)的重要考慮事項(xiàng)。安全隔離用于保護(hù)用戶免受有害電壓影響,功能隔離則專門用來保護(hù)設(shè)備和器件。電機(jī)控制系統(tǒng)可能包含各種各樣的隔離器件,例如:驅(qū)動(dòng)電路中的隔離式柵極驅(qū)動(dòng)器;檢測(cè)電路中的隔離式ADC、放大器和傳感器;以及通信電路中的隔離式SPI、RS-485、標(biāo)準(zhǔn)數(shù)字隔離器。無論是出于安全原因,還是為了優(yōu)化性能,都要求精心選擇這些器件。
雖然隔離是很重要的系統(tǒng)考慮,但它也存在缺點(diǎn):會(huì)提高功耗,跨過隔離柵傳輸數(shù)據(jù)會(huì)產(chǎn)生延遲,而且會(huì)增加系統(tǒng)成本。系統(tǒng)設(shè)計(jì)師傳統(tǒng)上求助于光隔離方案,多年來,它是系統(tǒng)隔離的當(dāng)然選擇。最近十年來,基于磁性(變壓器傳輸)方法的數(shù)字隔離器提供了一種可行且在很多時(shí)候更優(yōu)越的替代方案;從系統(tǒng)角度考慮,它還具備系統(tǒng)設(shè)計(jì)師可能尚未認(rèn)識(shí)到的優(yōu)點(diǎn)。
本文將討論這兩種隔離解決方案,重點(diǎn)論述磁隔離對(duì)延遲時(shí)序性能的改善,以及由此給電機(jī)控制應(yīng)用在系統(tǒng)層面帶來的好處。
隔離方法
光耦利用光作為主要傳輸方法,如圖1所示。發(fā)送側(cè)包括一個(gè)LED,高電平信號(hào)開啟LED,低電平信號(hào)關(guān)閉LED。接收側(cè)利用光電檢測(cè)器將接收到的光信號(hào)轉(zhuǎn)換回電信號(hào)。隔離由LED與光電檢測(cè)器之間的塑封材料提供,但也可利用額外的隔離層(通?;诰酆衔?予以增強(qiáng)。

圖1. 光耦結(jié)構(gòu)
光耦的最大缺點(diǎn)之一是:LED老化,會(huì)使傳輸特性漂移;設(shè)計(jì)人員必須考慮這一額外問題。LED老化導(dǎo)致時(shí)序性能隨著時(shí)間和溫度而漂移。因此,信號(hào)傳輸和上升/下降時(shí)間會(huì)受影響,使設(shè)計(jì)復(fù)雜化,尤其是考慮到本文后面要處理的問題。
光耦的性能擴(kuò)展也是受限的。為了提高數(shù)據(jù)速率,必須克服光耦固有的寄生電容問題,該問題會(huì)導(dǎo)致功耗升高。寄生電容還會(huì)提供耦合機(jī)制,導(dǎo)致基于光耦的隔離器件的CMTI(共模瞬變抗擾度)性能劣于競(jìng)爭(zhēng)方案。
磁隔離器(基于變壓器)已大規(guī)模應(yīng)用十多年,是光耦合器的有效替代方案。這類隔離器基于標(biāo)準(zhǔn)CMOS技術(shù),采用磁傳輸原理,隔離層由聚酰亞胺或二氧化硅構(gòu)成,如圖2所示。低電平電流以脈沖方式通過線圈傳輸,產(chǎn)生一個(gè)磁場(chǎng),磁場(chǎng)穿過隔離柵,在隔離柵另一側(cè)的第二線圈中感生一個(gè)電流。由于采用標(biāo)準(zhǔn)CMOS結(jié)構(gòu),其在功耗和速度方面具有明顯優(yōu)勢(shì),而且不存在光耦合器相關(guān)的壽命偏差問題。此外,基于變壓器的隔離器的CMTI性能優(yōu)于基于光耦合器的隔離器。
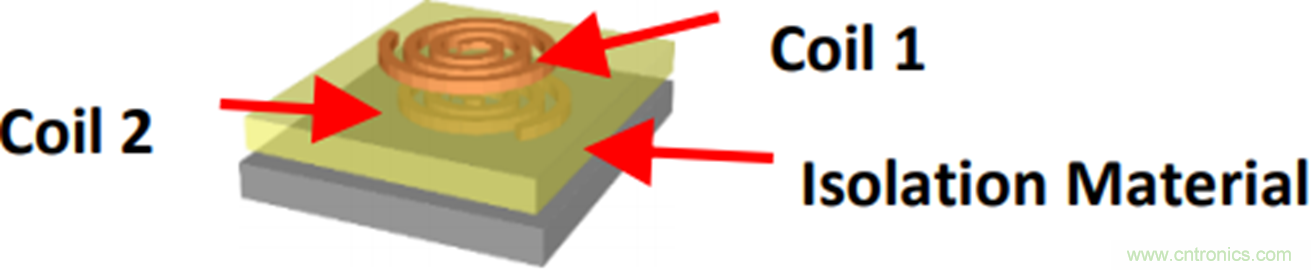
圖2. 磁性變壓器結(jié)構(gòu)
基于變壓器的隔離器還允許使用常規(guī)的信號(hào)處理模塊(防止傳輸雜散輸入)和高級(jí)傳輸編解碼機(jī)制。這樣就可以實(shí)現(xiàn)雙向數(shù)據(jù)傳輸,使用不同編碼方案來優(yōu)化功耗與傳輸速率的關(guān)系,以及將重要信號(hào)更快速、更一致地傳輸?shù)礁綦x柵另一端。
延遲特性比較
所有隔離器的一個(gè)重要但常常被輕視的特性是其傳輸延遲。此特性衡量信號(hào)(可以是驅(qū)動(dòng)信號(hào)或故障檢測(cè)信號(hào))沿任一方向跨過隔離柵所需的時(shí)間。技術(shù)不同,傳輸延遲差別很大。通常提供的是典型延遲值,但系統(tǒng)設(shè)計(jì)師特別關(guān)注最大延遲,它是設(shè)計(jì)電機(jī)控制系統(tǒng)需要考慮的重要特性。表1給出了光耦合器和磁隔離柵極驅(qū)動(dòng)器的傳輸延遲和延遲偏差值示例。
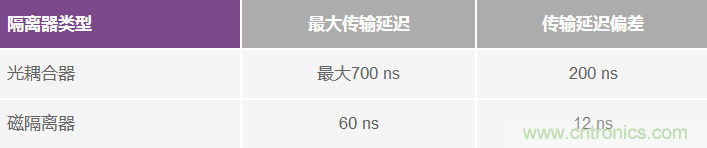
表1: 光耦合器和磁隔離器的典型延遲特性
如表1所示,磁隔離在最大延遲和延遲可重復(fù)性(偏差)方面優(yōu)勢(shì)明顯。這樣,電機(jī)控制設(shè)計(jì)人員對(duì)設(shè)計(jì)將更有信心,無需增加時(shí)序裕量以滿足柵極驅(qū)動(dòng)器特性。對(duì)于電機(jī)控制系統(tǒng)的性能和安全,這都有著非常重要的意義。
對(duì)電機(jī)控制系統(tǒng)的系統(tǒng)影響
圖3顯示了交流電機(jī)控制應(yīng)用中采用的典型三相逆變器。該逆變器由直流母線供電,直流電源通常是通過二極管橋式整流器和容性/感性-容性濾波器直接從交流電源產(chǎn)生。在大部分工業(yè)應(yīng)用中,直流母線電壓在300 V至1000 V范圍內(nèi)。采用脈寬調(diào)制(PWM)方案,以5 kHz至10 kHz的典型頻率切換功率晶體管T1至T6,從而在電機(jī)端子上產(chǎn)生可變電壓、可變頻率的三相正弦交流電壓。
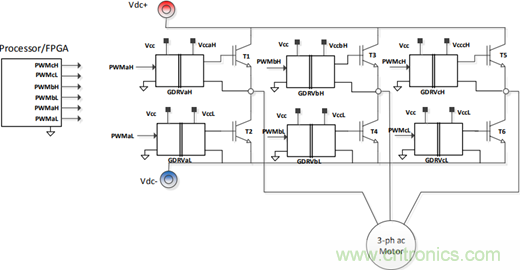
圖3. 電機(jī)控制應(yīng)用中的三相逆變器
PWM信號(hào)(如PWMaH和PWMaL)在電機(jī)控制器(一般用處理器和/或FPGA實(shí)現(xiàn))中產(chǎn)生。這些信號(hào)一般是低壓信號(hào),與處理器共地。為了正確開啟和關(guān)閉功率晶體管,邏輯電平信號(hào)的電壓電平和電流驅(qū)動(dòng)能力必須被放大, 另外還必須進(jìn)行電平轉(zhuǎn)換,從而以相關(guān)功率晶體管發(fā)射極為接地基準(zhǔn)。根據(jù)處理器在系統(tǒng)中的位置,這些信號(hào)可能還需要安全絕緣。
柵極驅(qū)動(dòng)器(如圖3中的GDRVaL和GDRVaH)執(zhí)行這種功能。每個(gè)柵極驅(qū)動(dòng)器IC都需要一個(gè)以處理器地為基準(zhǔn)的原邊電源電壓和一個(gè)以晶體管發(fā)射極為基準(zhǔn)的副邊電源。副邊電源的電壓電平必須能夠開啟功率晶體管(通常為15 V),并有足夠的電流驅(qū)動(dòng)能力來給晶體管柵極充電和放電。
逆變器死區(qū)時(shí)間
功率晶體管有一個(gè)有限的開關(guān)時(shí)間,因此,上橋和下橋晶體管之間的脈寬調(diào)制波形中必須插入一個(gè)死區(qū)時(shí)間,如圖4所示。這是為了防止兩個(gè)晶體管意外同時(shí)接通,引起高壓直流母線短路,進(jìn)而造成系統(tǒng)故障和/或損壞風(fēng)險(xiǎn)。死區(qū)時(shí)間的長(zhǎng)度由兩個(gè)因素決定:晶體管開關(guān)時(shí)間和柵極驅(qū)動(dòng)器傳輸延遲失配(包括失配的任何漂移)。換言之,死區(qū)時(shí)間必須考慮PWM信號(hào)從處理器到上橋和下橋柵極驅(qū)動(dòng)器之間的晶體管柵極的任何傳輸時(shí)間差異。
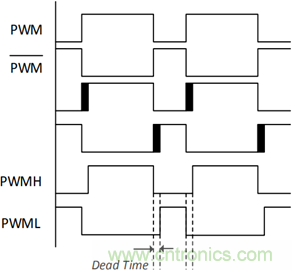
圖4. 死區(qū)時(shí)間插補(bǔ)
死區(qū)時(shí)間會(huì)影響施加到電機(jī)的平均電壓,尤其是在低速運(yùn)轉(zhuǎn)時(shí)。實(shí)際上,死區(qū)時(shí)間會(huì)帶來以下近似恒定幅度的誤差電壓:
其中, 為誤差電壓,
為誤差電壓, 為死區(qū)時(shí)間,
為死區(qū)時(shí)間, 和
和 為晶 體管開啟和關(guān)閉延遲時(shí)間,
為晶 體管開啟和關(guān)閉延遲時(shí)間, 為PWM開關(guān)周期,
為PWM開關(guān)周期, 為直流母線電壓,
為直流母線電壓, 為功率晶體管的導(dǎo)通狀態(tài)壓降,
為功率晶體管的導(dǎo)通狀態(tài)壓降, 為二極管導(dǎo)通電壓。
為二極管導(dǎo)通電壓。
當(dāng)一個(gè)相電流改變方向時(shí),誤差電壓改變極性,因此,當(dāng)線路電流過零時(shí),電機(jī)線間電壓發(fā)生階躍變化。這會(huì)引起正弦基波電壓的諧波,進(jìn)而在電機(jī)中產(chǎn)生諧波電流。對(duì)于開環(huán)驅(qū)動(dòng)采用的較大低阻抗電機(jī),這是一個(gè)特別重要的問題,因?yàn)橹C波電流可能很大,導(dǎo)致低速振動(dòng)、扭矩紋波和諧波加熱。
在以下條件下,死區(qū)時(shí)間對(duì)電機(jī)輸出電壓失真的影響最嚴(yán)重:
- 高直流母線電壓
- 長(zhǎng)死區(qū)時(shí)間
- 高開關(guān)頻率
- 低速工作,特別是在控制算法未添加任何補(bǔ)償?shù)拈_環(huán)驅(qū)動(dòng)中
低速工作很重要,因?yàn)檎窃谶@種模式下,施加的電機(jī)電壓在任何情況下都非常低,死區(qū)時(shí)間導(dǎo)致的誤差電壓可能是所施加電機(jī)電壓的很大一部分。此外,誤差電壓導(dǎo)致的扭曲抖動(dòng)的影響更有害,因?yàn)閷?duì)系統(tǒng)慣性的濾波只有在較高速度下才可用。
在所有這些參數(shù)中,死區(qū)時(shí)間長(zhǎng)度是唯一受隔離式柵極驅(qū)動(dòng)器技術(shù)影響的參數(shù)。死區(qū)時(shí)間長(zhǎng)度的一部分是由功率晶體管的開關(guān)延遲時(shí)間決定的,但其余部分與傳播延遲失配有關(guān)。在這方面,光隔離器顯然不如磁隔離技術(shù)。
應(yīng)用示例
為了說明死區(qū)時(shí)間對(duì)電機(jī)電流失真的影響,下面給出了基于三相逆變的開環(huán)電機(jī)驅(qū)動(dòng)的結(jié)果。逆變器柵極驅(qū)動(dòng)器采用ADI公司的磁隔離器(ADuM4223ADuM4223), 直接驅(qū)動(dòng)IR的IRG7PH46UDPBF 1200 V IGBT。直流母線電壓為700 V。逆變器驅(qū)動(dòng)開環(huán)V/f控制模式下的三相感應(yīng)電機(jī)。利用阻性分壓器和分流電阻,并結(jié)合隔離式∑–? 調(diào)制器(同樣是來自ADI公司的AD7403),分別測(cè)量線電壓和相電流。各調(diào)制器輸出的單位數(shù)據(jù)流被送至控制處理器(ADI公司的ADSP-CM408)的sinc濾波器,數(shù)據(jù)在其中進(jìn)行濾波和抽取后,產(chǎn)生電壓和電流信號(hào)的精確表示。
sinc數(shù)字濾波器輸出的線電壓實(shí)測(cè)結(jié)果如圖5所示。實(shí)際線電壓為10 kHz的高開關(guān)頻率波形,但它被數(shù)字濾波器濾除,以便顯示我們感興趣的低頻部分。相應(yīng)的電機(jī)相電流如圖6 所示。
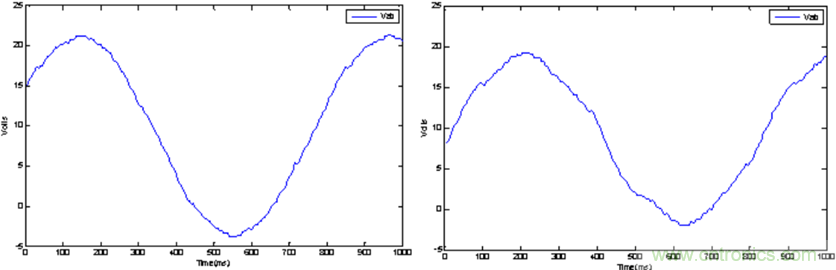
圖5. 實(shí)測(cè)線間電機(jī)電壓:(左)500 ns死區(qū)時(shí)間;(右)1 µs死區(qū)時(shí)間
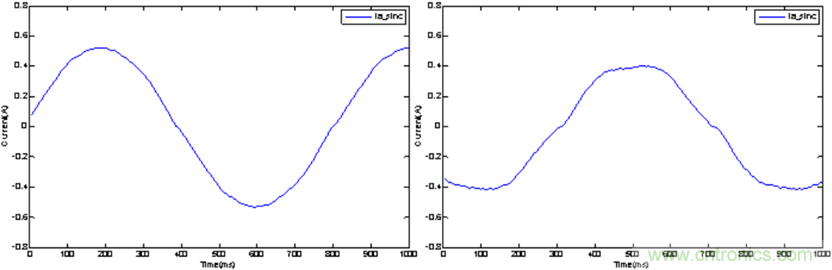
圖6. 實(shí)測(cè)電機(jī)電流:(左)500 ns死區(qū)時(shí)間;(右)1µs死區(qū)時(shí)間
ADuM4223柵極驅(qū)動(dòng)器的傳輸延遲失配為12 ns,因此可以使用IGBT開關(guān)所需的絕對(duì)最短死區(qū)時(shí)間。對(duì)于IR IGBT,最短死區(qū)時(shí)間可設(shè)置為500 ns。從左圖可看出,這種情況下的電壓失真極小。同樣,相電流也是很好的正弦波,因此扭矩紋波極小。右圖顯示死區(qū)時(shí)間提高到1 µs時(shí)的線電壓和相電流。此值更能代表光耦合柵極驅(qū)動(dòng)器的需求,因?yàn)槠鋫鞑パ舆t失配和漂移更大。電壓和電流的失真均有明顯增加。這種情況使用的感應(yīng)電機(jī)是相對(duì)較小的高阻抗電機(jī)。在更高功率的終端應(yīng)用中,感應(yīng)電機(jī)阻抗通常要低得多,導(dǎo)致電機(jī)電流失真和扭矩紋波增加。扭矩紋波在很多應(yīng)用中都會(huì)產(chǎn)生有害影響,例如:電梯乘坐舒適度下降或機(jī)械系統(tǒng)中的軸承/聯(lián)軸器磨損。
過流關(guān)斷
現(xiàn)代柵極驅(qū)動(dòng)器的另一個(gè)重要問題是處理器發(fā)出的關(guān)斷命令能以多快的速度在IGBT上實(shí)現(xiàn)。這對(duì)于以下情況中的過流關(guān)斷很重要:過流檢測(cè)不是柵極驅(qū)動(dòng)器本身的一部分,而是作為檢測(cè)與濾波電路的一部分加以實(shí)現(xiàn)。這方面的另一個(gè)壓力是更高效率IGBT的短路耐受時(shí)間縮短。對(duì)此,IGBT技術(shù)的趨勢(shì)是從業(yè)界標(biāo)準(zhǔn)10µs縮短到5 µs甚至更短。如圖7所示,過流檢測(cè)電路通常需要數(shù)微秒時(shí)間來鎖存故障;為了順應(yīng)總體發(fā)展趨勢(shì),必須采取措施來縮短這一檢測(cè)時(shí)間。該路徑中的另一主要因素是從處理器/FPGA輸出到IGBT柵極(柵極驅(qū)動(dòng)器)的傳播延遲。同樣,磁隔離器相對(duì)于光學(xué)器件有明顯優(yōu)勢(shì),原因是前者的傳播延遲值非常小,通常在50 ns左右,不再是影響因素。相比之下,光耦合器的傳播延遲在500 ns左右,占到總時(shí)序預(yù)算的很大一部分。
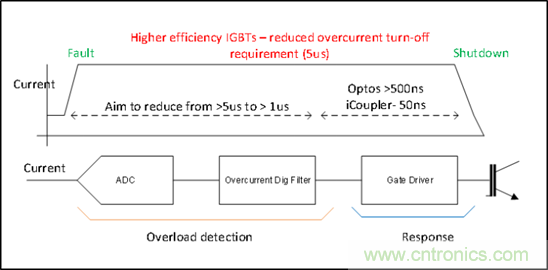
圖7. 故障關(guān)斷時(shí)序
電機(jī)控制應(yīng)用的柵極驅(qū)動(dòng)器關(guān)斷時(shí)序如圖8所示,其中處理器的關(guān)斷命令跟在IGBT柵極發(fā)射極信號(hào)之后。從關(guān)斷信號(hào)開始到IGBT柵極驅(qū)動(dòng)信號(hào)接近0的總延遲僅有72 ns。
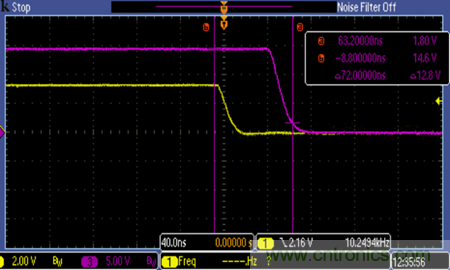
圖8. 過流關(guān)斷柵極驅(qū)動(dòng)器時(shí)序
小結(jié)
隨著人們更加關(guān)注系統(tǒng)性能、效率和安全,電機(jī)控制架構(gòu)師在設(shè)計(jì)穩(wěn)健系統(tǒng)時(shí)面臨著日益復(fù)雜的挑戰(zhàn)?;诠怦詈掀鞯臇艠O驅(qū)動(dòng)器是傳統(tǒng)選擇,但基于變壓器的解決方案不僅在功耗、速度、時(shí)間穩(wěn)定性上更具優(yōu)勢(shì),而且如本文所述,由于信號(hào)延遲縮短,其在系統(tǒng)性能和安全方面也有明顯優(yōu)勢(shì)。這使得設(shè)計(jì)人員可以在防止上橋和下橋開關(guān)同時(shí)接通的同時(shí),有把握地縮短死區(qū)時(shí)間,改善系統(tǒng)性能。此外,它還支持對(duì)系統(tǒng)命令和錯(cuò)誤作出更快速的響應(yīng),這同樣能增強(qiáng)系統(tǒng)可靠性并提高安全性。鑒于這些優(yōu)勢(shì),基于變壓器的隔離式柵極驅(qū)動(dòng)器已成為電機(jī)控制系統(tǒng)設(shè)計(jì)的一個(gè)主要選擇;強(qiáng)烈建議系統(tǒng)設(shè)計(jì)人員在設(shè)計(jì)下一個(gè)項(xiàng)目時(shí),把器件延遲作為一項(xiàng)重要要求。
本文轉(zhuǎn)載自亞德諾半導(dǎo)體。
推薦閱讀:



