

【導(dǎo)讀】如何正確選擇伺服電機(jī)和步進(jìn)電機(jī)?主要視具體應(yīng)用情況而定,簡單地說要確定:負(fù)載的性質(zhì)=,轉(zhuǎn)矩、慣量、轉(zhuǎn)速、精度、加減速等要求,上位控制要求,主要控制方式是位置、轉(zhuǎn)矩還是速度方式。供電電源是直流還是交流電源,或電池供電,電壓范圍。據(jù)此以確定電機(jī)和配用驅(qū)動器或控制器的型號。
步進(jìn)電機(jī)主要是依相數(shù)來做分類,而其中又以二相、五相步進(jìn)電機(jī)為目前市場上所廣泛采用。二相步進(jìn)電機(jī)每轉(zhuǎn)最細(xì)可分割為400等分,五相則可分割為1000等分,所以表現(xiàn)出來的特性以五相步進(jìn)電機(jī)較佳、加減速時間較短、動態(tài)慣性較低。
二相/五相步進(jìn)電機(jī)差異比較:
電機(jī)構(gòu)造:
二相步進(jìn)電機(jī):8個主極‧;4相(2相)4極線圈
五相步進(jìn)電機(jī):10個主極‧;5相2極線圈
分解能:
二相步進(jìn)電機(jī):1.8°/0.9°(200、400分割/圈)
五相步進(jìn)電機(jī):0.72°/0.36°(500、1000分割/圈),較二相步進(jìn)電機(jī)高出2.5倍
振動性:
二相步進(jìn)電機(jī):100-200pps之間為低速共振領(lǐng)域,振動較大,無顯著共振點(diǎn)
五相步進(jìn)電機(jī):低振動,速度—轉(zhuǎn)矩特性,于速度上不及五相步進(jìn)電機(jī),高速度、高轉(zhuǎn)矩
步進(jìn)電機(jī)是一種離散運(yùn)動的裝置,它和現(xiàn)代數(shù)字控制技術(shù)有著本質(zhì)的聯(lián)系。在目前國內(nèi)的數(shù)字控制系統(tǒng)中,步進(jìn)電機(jī)的應(yīng)用十分廣泛。隨著全數(shù)字式交流伺服系統(tǒng)的出現(xiàn),交流伺服電機(jī)也越來越多地應(yīng)用于數(shù)字控制系統(tǒng)中。為了適應(yīng)數(shù)字控制的發(fā)展趨勢,運(yùn)動控制系統(tǒng)中大多采用步進(jìn)電機(jī)或全數(shù)字式交流伺服電機(jī)作為執(zhí)行電動機(jī)。雖然兩者在控制方式上相似(脈沖串和方向信號),但在使用性能和應(yīng)用場合上存在著較大的差異。
現(xiàn)就二者的使用性能作一比較。
一、控制精度不同
兩相混合式步進(jìn)電機(jī)步距角一般為3.6°、1.8°,五相混合式步進(jìn)電機(jī)步距角一般為0.72°、0.36°。也有一些高性能的步進(jìn)電機(jī)步距角更小。如四通公司生產(chǎn)的一種用于慢走絲機(jī)床的步進(jìn)電機(jī),其步距角為0.09°;德國百格拉公司(bergerlahr)生產(chǎn)的三相混合式步進(jìn)電機(jī)其步距角可通過撥碼開關(guān)設(shè)置為1.8°、0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了兩相和五相混合式步進(jìn)電機(jī)的步距角。
交流伺服電機(jī)的控制精度由電機(jī)軸后端的旋轉(zhuǎn)編碼器保證。以松下全數(shù)字式交流伺服電機(jī)為例,對于帶標(biāo)準(zhǔn)2500線編碼器的電機(jī)而言,由于驅(qū)動器內(nèi)部采用了四倍頻技術(shù),其脈沖當(dāng)量為360°/10000=0.036°。對于帶17位編碼器的電機(jī)而言,驅(qū)動器每接收217=131072個脈沖電機(jī)轉(zhuǎn)一圈,即其脈沖當(dāng)量為360°/131072=9.89秒。是步距角為1.8°的步進(jìn)電機(jī)的脈沖當(dāng)量的1/655。
[page]
二、低頻特性不同
步進(jìn)電機(jī)在低速時易出現(xiàn)低頻振動現(xiàn)象。振動頻率與負(fù)載情況和驅(qū)動器性能有關(guān),一般認(rèn)為振動頻率為電機(jī)空載起跳頻率的一半。這種由步進(jìn)電機(jī)的工作原理所決定的低頻振動現(xiàn)象對于機(jī)器的正常運(yùn)轉(zhuǎn)非常不利。當(dāng)步進(jìn)電機(jī)工作在低速時,一般應(yīng)采用阻尼技術(shù)來克服低頻振動現(xiàn)象,比如在電機(jī)上加阻尼器,或驅(qū)動器上采用細(xì)分技術(shù)等。
交流伺服電機(jī)運(yùn)轉(zhuǎn)非常平穩(wěn),即使在低速時也不會出現(xiàn)振動現(xiàn)象。交流伺服系統(tǒng)具有共振抑制功能,可涵蓋機(jī)械的剛性不足,并且系統(tǒng)內(nèi)部具有頻率解析機(jī)能(fft),可檢測出機(jī)械的共振點(diǎn),便于系統(tǒng)調(diào)整。
三、矩頻特性不同
步進(jìn)電機(jī)的輸出力矩隨轉(zhuǎn)速升高而下降,且在較高轉(zhuǎn)速時會急劇下降,所以其最高工作轉(zhuǎn)速一般在300~600rpm。
交流伺服電機(jī)為恒力矩輸出,即在其額定轉(zhuǎn)速(一般為2000rpm或3000rpm)以內(nèi),都能輸出額定轉(zhuǎn)矩,在額定轉(zhuǎn)速以上為恒功率輸出。
四、過載能力不同
步進(jìn)電機(jī)一般不具有過載能力。交流伺服電機(jī)具有較強(qiáng)的過載能力。以松下交流伺服系統(tǒng)為例,它具有速度過載和轉(zhuǎn)矩過載能力。其最大轉(zhuǎn)矩為額定轉(zhuǎn)矩的三倍,可用于克服慣性負(fù)載在啟動瞬間的慣性力矩。步進(jìn)電機(jī)因?yàn)闆]有這種過載能力,在選型時為了克服這種慣性力矩,往往需要選取較大轉(zhuǎn)矩的電機(jī),而機(jī)器在正常工作期間又不需要那么大的轉(zhuǎn)矩,便出現(xiàn)了力矩浪費(fèi)的現(xiàn)象。
五、運(yùn)行性能不同
步進(jìn)電機(jī)的控制為開環(huán)控制,啟動頻率過高或負(fù)載過大易出現(xiàn)丟步或堵轉(zhuǎn)的現(xiàn)象,停止時轉(zhuǎn)速過高易出現(xiàn)過沖的現(xiàn)象,所以為保證其控制精度,應(yīng)處理好升、降速問題。交流伺服驅(qū)動系統(tǒng)為閉環(huán)控制,驅(qū)動器可直接對電機(jī)編碼器反饋信號進(jìn)行采樣,內(nèi)部構(gòu)成位置環(huán)和速度環(huán),一般不會出現(xiàn)步進(jìn)電機(jī)的丟步或過沖的現(xiàn)象,控制性能更為可靠。
六、速度響應(yīng)性能不同
步進(jìn)電機(jī)從靜止加速到工作轉(zhuǎn)速(一般為每分鐘幾百轉(zhuǎn))需要200~400毫秒。交流伺服系統(tǒng)的加速性能較好,以松下msma400w交流伺服電機(jī)為例,從靜止加速到其額定轉(zhuǎn)速3000rpm僅需幾毫秒,可用于要求快速啟停的控制場合。
綜上所述,交流伺服系統(tǒng)在許多性能方面都優(yōu)于步進(jìn)電機(jī)。但在一些要求不高的場合也經(jīng)常用步進(jìn)電機(jī)來做執(zhí)行電動機(jī)。所以,在控制系統(tǒng)的設(shè)計過程中要綜合考慮控制要求、成本等多方面的因素,選用適當(dāng)?shù)目刂齐姍C(jī)。
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度(及步進(jìn)角)。
您可以通過控制脈沖個數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時您可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動的速度和加速度,從而達(dá)到調(diào)速的目的。
步進(jìn)電機(jī)分三種:永磁式(pm),反應(yīng)式(vr)和混合式(hb)
永磁式步進(jìn)一般為兩相,轉(zhuǎn)矩和體積較小,步進(jìn)角一般為7.5度或15度;
反應(yīng)式步進(jìn)一般為三相,可實(shí)現(xiàn)大轉(zhuǎn)矩輸出,步進(jìn)角一般為1.5度,但噪聲和振動都很大。在歐美等發(fā)達(dá)國家80年代已被淘汰;
混合式步進(jìn)是指混合了永磁式和反應(yīng)式的優(yōu)點(diǎn)。它又分為兩相和五相:兩相步進(jìn)角一般為1.8度而五相步進(jìn)角一般為0.72度。這種步進(jìn)電機(jī)的應(yīng)用最為廣泛。
[page]
1、如何正確選擇伺服電機(jī)和步進(jìn)電機(jī)
主要視具體應(yīng)用情況而定,簡單地說要確定:負(fù)載的性質(zhì)(如水平還是垂直負(fù)載等),轉(zhuǎn)矩、慣量、轉(zhuǎn)速、精度、加減速等要求,上位控制要求(如對端口界面和通訊方面的要求),主要控制方式是位置、轉(zhuǎn)矩還是速度方式。供電電源是直流還是交流電源,或電池供電,電壓范圍。據(jù)此以確定電機(jī)和配用驅(qū)動器或控制器的型號。
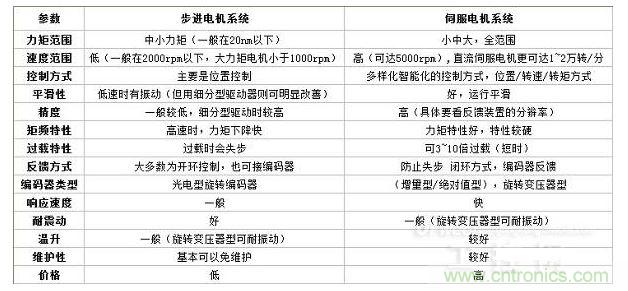
2、選擇步進(jìn)電機(jī)還是伺服電機(jī)系統(tǒng)?
其實(shí),選擇什么樣的電機(jī)應(yīng)根據(jù)具體應(yīng)用情況而定,各有其特點(diǎn)。請見下表,自然明白。
3、如何配用步進(jìn)電機(jī)驅(qū)動器?
根據(jù)電機(jī)的電流,配用大于或等于此電流的驅(qū)動器。如果需要低振動或高精度時,可配用細(xì)分型驅(qū)動器。對于大轉(zhuǎn)矩電機(jī),盡可能用高電壓型驅(qū)動器,以獲得良好的高速性能。
4、2相和5相步進(jìn)電機(jī)有何區(qū)別,如何選擇?
2相電機(jī)成本低,但在低速時的震動較大,高速時的力矩下降快。5相電機(jī)則振動較小,高速性能好,比2相電機(jī)的速度高30~50%,可在部分場合取代伺服電機(jī)。
5、何時選用直流伺服系統(tǒng),它和交流伺服有何區(qū)別?
直流伺服電機(jī)分為有刷和無刷電機(jī)。
有刷電機(jī)成本低,結(jié)構(gòu)簡單,啟動轉(zhuǎn)矩大,調(diào)速范圍寬,控制容易,需要維護(hù),但維護(hù)方便(換碳刷),產(chǎn)生電磁干擾,對環(huán)境有要求。因此它可以用于對成本敏感的普通工業(yè)和民用場合。
無刷電機(jī)體積小,重量輕,出力大,響應(yīng)快,速度高,慣量小,轉(zhuǎn)動平滑,力矩穩(wěn)定??刂茝?fù)雜,容易實(shí)現(xiàn)智能化,其電子換相方式靈活,可以方波換相或正弦波換相。電機(jī)免維護(hù),效率很高,運(yùn)行溫度低,電磁輻射很小,長壽命,可用于各種環(huán)境。
交流伺服電機(jī)也是無刷電機(jī),分為同步和異步電機(jī),目前運(yùn)動控制中一般都用同步電機(jī),它的功率范圍大,可以做到很大的功率。大慣量,最高轉(zhuǎn)動速度低,且隨著功率增大而快速降低。因而適合做低速平穩(wěn)運(yùn)行的應(yīng)用。
6、使用電機(jī)時要注意的問題
上電運(yùn)行前要作如下檢查:
1)電源電壓是否合適(過壓很可能造成驅(qū)動模塊的損壞);對于直流輸入的+/-極性一定不能接錯,驅(qū)動控制器上的電機(jī)型號或電流設(shè)定值是否合適(開始時不要太大);
2)控制信號線接牢靠,工業(yè)現(xiàn)場最好要考慮屏蔽問題(如采用雙絞線);
3)不要開始時就把需要接的線全接上,只連成最基本的系統(tǒng),運(yùn)行良好后,再逐步連接。
4)一定要搞清楚接地方法,還是采用浮空不接。
5)開始運(yùn)行的半小時內(nèi)要密切觀察電機(jī)的狀態(tài),如運(yùn)動是否正常,聲音和溫升情況,發(fā)現(xiàn)問題立即停機(jī)調(diào)整。




